
In a previous article, I reviewed the challenges facing today and tomorrow’s surface vessels. The main ones are the proliferation of satellite observation capabilities and of capable anti-ship missiles, a deadly combination which can seriously reduce the ability of Western navies to exert influence. Modern, stealthy fighters and conventional submarines are also a significant threat. This articles describes how such a problem can be addressed not by building better frigates, but by using small uncrewed submarines to take over the land strike mission.

The problem
The problems of using a frigate or a cruiser as a land strike platform are multiple:
- They are expensive, so only a limited number of them can be on-station at a given time. This makes them easier to track, and in some situation easier to defeat: during the strike against Syrian chemical weapon sites, Russian ships shadowed two of the three French frigates, preventing missile launch.
- They are often multi-mission capable, but just loitering in an area waiting to strike can be a waste of the other capabilities. To get back to the example of the French frigates, the ones that carry cruise missiles are actually exquisite anti-submarine platforms. If there is little submarine activity in the region, the effort invested in outfitting the frigate and training the specialized sailors is wasted.
- They are crewed, and thus cannot be sacrificed. This means they have to be outfitted with defenses, and that it is a bad idea to arm them with long-range rockets: when they are fired, they instantly give the exact position of the ship to anyone with a counter-battery radar, making it much easier to mount a counterstrike against the ship. That is why low-flying cruise missiles are preferred, as they are much harder to detect.
- A consequence of using cruise missiles is that they cannot provide very responsive fire support. A subsonic cruise missile will take one hour to cross 1000km, so it is not possible to engage targets that reposition quickly with them, or to support troop in contact with the ennemy.
Naval engineer René Loire tried to address some of these issues by proposing the arsenal ship concept, a ship that would be filled with missile silos, carry very little sensors and rely on other platforms to get a target designation. Most versions of it were relatively stealthy, as once on the deployment zone it would fill ballast tanks with water so that it would stick only a few meter out of the water. However it would still have constituted a juicy target, which meant it had to be escorted by standard frigates, defeating its purpose. The US Navy showed some interest in the idea but it never materialized in the end as surface ships. However, the US Navy modified 4 Ohio-class ballistic missiles submarines (SSBNs) into guided-missile submarines (SSGNs) armed with more than a hundred tomahawks each.

The solution
Lets try to address each point to see were that takes us:
- To make the whole force hard to track, it should be split up in small platforms, with each one being somewhat stealthy. Each one should at least defeat long-range search sensors, so that the enemy has to get close to one by chance and keep trailing it to know where it is, forcing it to dedicate significant resources to this task.
- To optimize resource allocation, they should only do one task, that is carry strike missiles.
- They should not be crewed, so that they can be sacrificed without concern. That also means there is no need to assign sailors to the very dull mission of just circling in international waters waiting for the order to strike.
- Since it does not matter if they are located and destroyed by the enemy after firing their first salvo, they can be equipped with long-range rockets, and thus can provide a responsive fire support.
So we are headed towards small unmanned platform carrying only long-range rockets, and no sensors. The choice of the platform is very important regarding its stealth. Surface ships have been getting increasingly stealthier over time, with the Visby corvette or the Lafayette frigate being the precursors:

Visby corvette 
Lafayette frigate
These ships have simple geometrical shapes to reduce radar returns. However they still appear on radar, but as smaller vessels. They can be mistaken for small trawlers, and that also reduces the detection range. However, imaging radars are still able to identify them at long range. Having a smaller radar signature also makes the job of the shipborne electronic countermeasures easier, as they require less power to mask the ship’s return.
This radar signature reduction pushed to the extreme is embodied by the Sea shadow, a US prototype with the minimal number of flat surfaces:

Nevertheless, the best way to reduce radar return fully is to be a submarine. This also zeroes out the infrared signature, and makes the platform invisible except through sonar. In an age where satellite constellation with wide-area optical and radar sensors proliferate, it is extremely interesting. Note that no only large nations such as Russia or China might benefit from these constellation: they can also pass along the information gained to their allies, enabling relatively small countries to get a target designation even very far away from their shores, and strike them with long-range missiles.
Now, there are two main types of submarines: nuclear-powered ones, and the rest. Developing a small naval nuclear reactor for a submarine drone is certainly possible, Russia has done it for its Harpsichord deep-diving drone. However, parking nuclear reactors close to an hostile country’s shoreline might lead to very serious diplomatic incident if one has a malfunction, sinks and releases radioactive products. The international blow-back might be hard to withstand, especially in a democracy with a strong environmental or anti-nuclear current. Thus, I think it is too much of a political risk to build a proliferated force of nuclear-powered submarine drones.
This leaves us with the other option: conventional submarine propulsion. Contrary to nuclear propulsion, which provides an almost endless amount of energy and can propel a boat at high speed for a long time without needing to surface, conventional propulsion is much more limited. The energy is stored in batteries, which can only hold so much. Consequently, every few days, the submarine has to get close to the surface, raise a snorkel mast serving as an air intake, and use that air and the hydrocarbon fuel it has in its tank to power a diesel engine, which in turn recharges the batteries. This makes the submarine vulnerable, as the snorkel can be detected by the radars of maritime patrol aircrafts, and operating close to the surface may make it more visible to enemy sonars, depending on the acoustic properties of the water column.
Consequently, submarine manufacturers have tried ways around this problem, and have developed Air-Independent Propulsion (AIP) modules. They consist in storing liquid oxygen and some form of fuel (usually methanol or some form of stable hydrogen), and consuming them to produce energy in a Stirling engine or a fuel cell. This type of module can extend the submerged endurance of a submarine to a few weeks at low speed.
Some hybrid options between the surface ship and the submarine exist. Such submersibles transit at high speed on the surface, and then once on their area of operations dive to become stealthy. This was the common mode of operation before the snorkel was invented, and some concept ships still toy around with this idea:

Uncrewed ship and submarine projects over the world
The US are considering developing unmanned ships, and while they are starting with surface ships conventional hull forms for their MUSV and LUSV projects, the military research agency DARPA has issued a call for innovative ideas for new types of unmanned ships with long endurance and a high level of stealth:
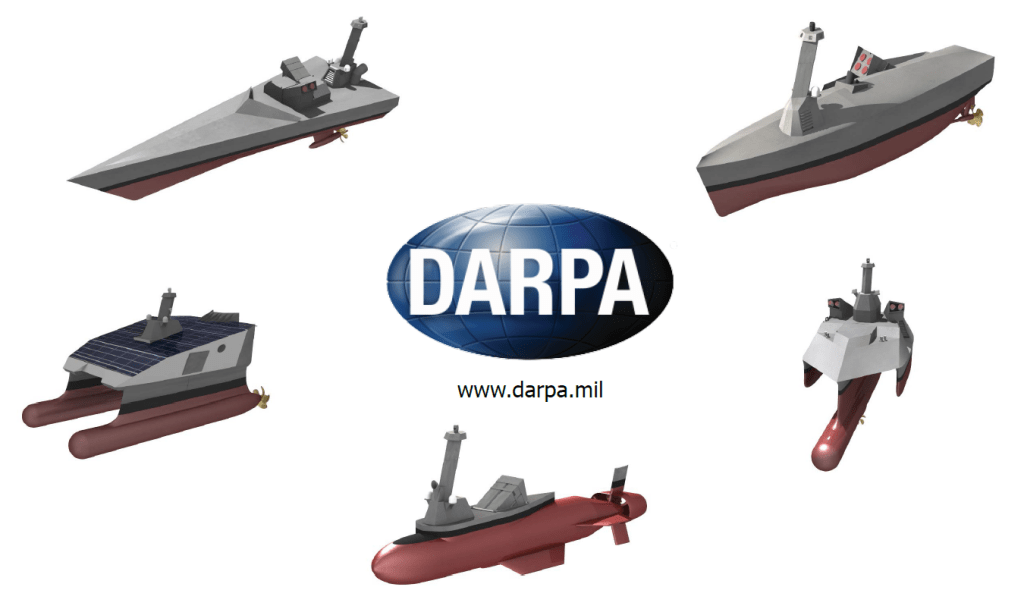
In parallel, the US also has a unmanned submarine program, with large platforms called XLUUV (eXtra Large Unmanned Underwater Vehicle). Those are being built by Boeing, based on its Echo Voyager platform, and will be able to carry 8 tonnes of payload in a 10-meter long bay. They will be 26m long, have a 2.6m diameter and use a conventional batteries, snorkel and diesel engine propulsion system. That gives them a 6500nm range at 3 knots, however, they need to snorkel every 150nm to recharge the batteries. The echo voyager is relatively light, at 50 tonnes in air, restricting its ability to carry a large payload.

The Royal Navy is also procuring a similar 30m UUV. The Russians also have many projects, with the afore-mentioned nuclear-powered Harpsichord UUV. They are experts in building small nuclear reactors, with other projects including a nuclear-powered cruise missile and a nuclear-powered torpedo. There are probably many other projects, especially in the US, Russia and China, which have not been revealed to the public.
Design proposal
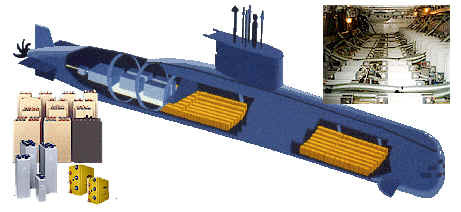
The idea is to field a large number of uncrewed submarines with air-independent propulsion. They would deploy to their patrol area without ever needing to surface, loiter there for a few month, and then head back for replenishment. Each would carry 16 long-range rockets.
Here is a mockup with the main volumes:
The drone has a 3m diameter and 30m length, and has a single thick hull. It is designed for a cruise speed of 3 knots, and can cross 1600nm at that speed, loiter on station at 1 knot for 8 month and then head back, for a total mission duration of 9.5 month.
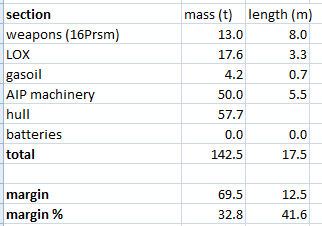
The approximate mass and volume budget is the following (with the detailed spreadsheet here):
Operational concept
The idea is simple: transit at low speed towards the enemy coast, then loiter there threatening inland targets with 16 500km+ range weapons, before heading home for refuel and maintenance.
Let”s put it in context with two scenarios: one in the Mediterranean and one in the Pacific.
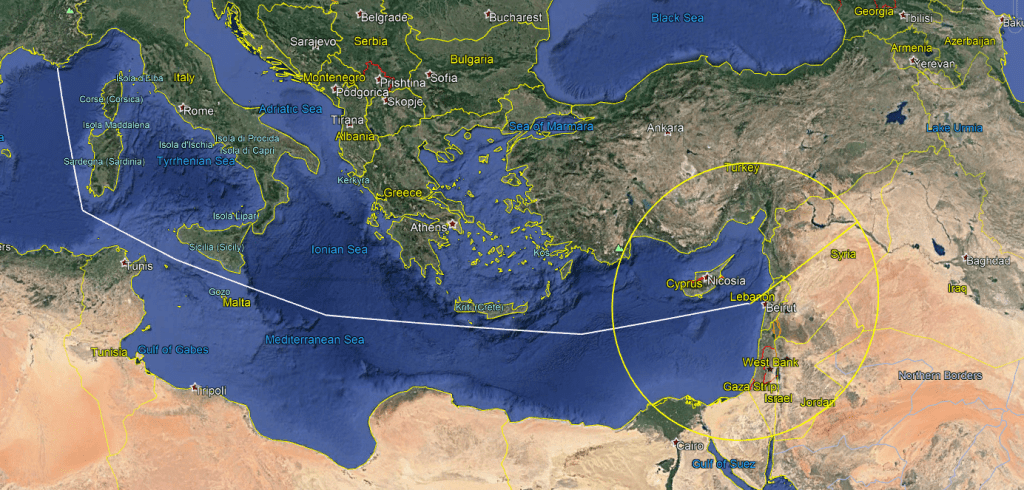
In the Mediterranean, the French Navy has been clashing with the Turkish one, and France has been bombing Daesh in Syria and Irak for a few years. Lybia is also a region of interest. Here is a sample mission, with a 1600nm deployment off the coast of Lebanon to cover Syria, with a 500-km range missile:
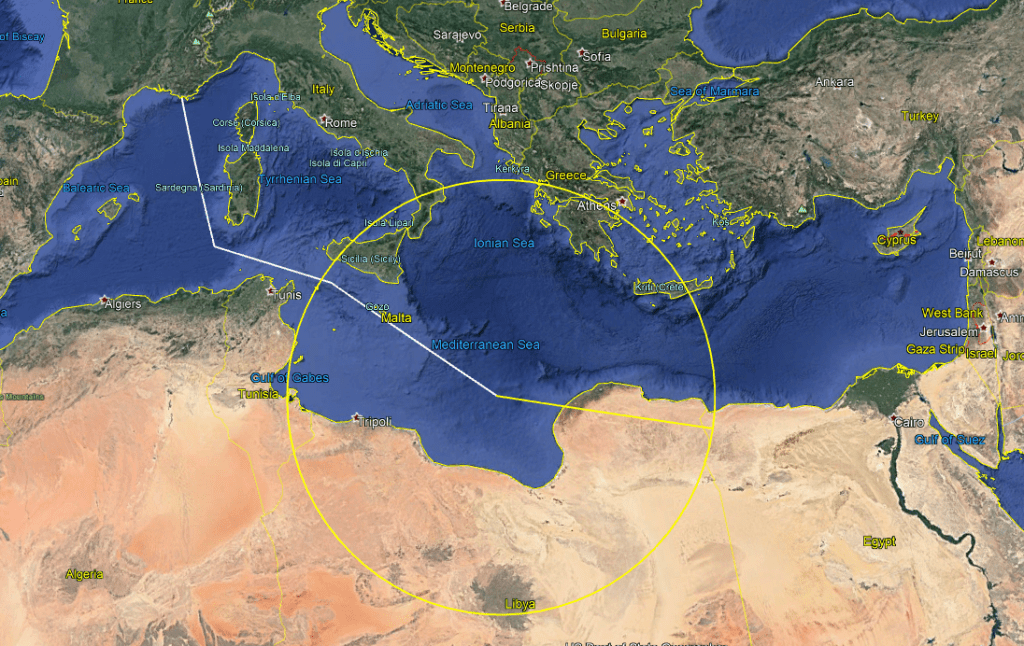
Here is a mission with a 900nm deployment off Lybia, and a 700km missile:
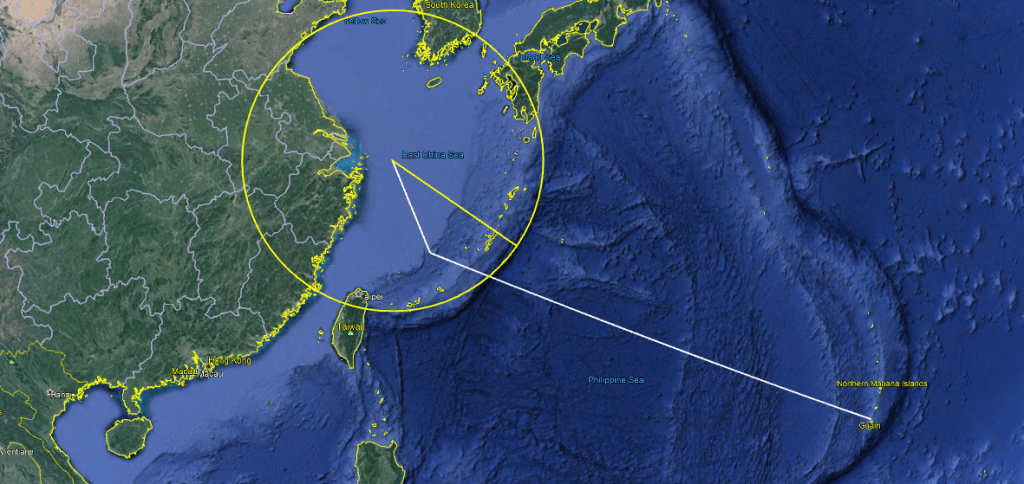
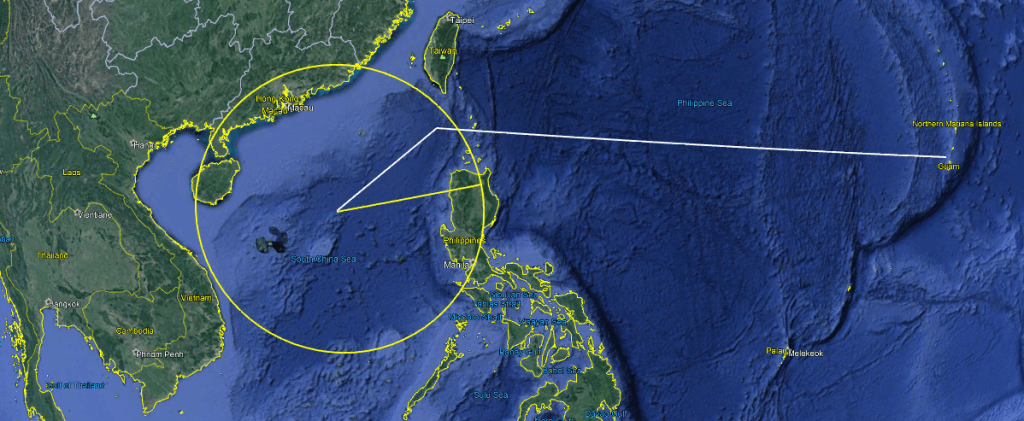
Regarding the Pacific, the US Navy has shown a strong interest in uncrewed systems to be able to strike Chinese installations on the various islands and the Chinese ships. Here is an East China Sea mission with a 1600nm deployment from Guam, and a 700km missile:
And here is a 1800nm deployment to the South China Sea, also with a 700km missile.
Note that the drone is not useful for Western countries only, as the symmetric of these missions (for instance from a Chinese Navy base towards Guam) are possible.
The cruise speed being 3 knots, deploying 1600nm away takes 3 weeks, which is quite long as a crisis can develop faster than that, so the drones have to be pre-positioned in patrol areas close to the enemy shore. The patrol area can be a little away from the actual position so as not to put too much pressure during peacetime and give the adversary a wider area to search, and as tensions increase the drones can get closer to shore.
The drone can then loiter for 26 weeks at the minimum speed possible to control its immersion (which I put at 1 knot but could be lower), and then head back. That gives an 80% on-station rate. Depending on how long the maintenance cycle is after a mission, as little as two drones could be required to keep one on-station at all times. With one month of post-mission maintenance (which seems a lot as there are not many systems to maintain apart from the engine), the overall on-station rate would be 70%, so with three drone there would be always two on-station.
If the enemy has good anti-submarine capabilities and a radar able to detect the rocket and estimate its launch point, then the survival chances of the drone after firing its first salvo are slim, so all weapons should be fired at once, preferably against a set of multiple pre-defined objectives, or a well-defended or extended target of opportunity. Against less capable adversaries, there is no such need and the drones can fire only a few rockets at a time.
Once all weapons are expended, the time to rearm at the home port and then get back to the patrol area is quite long, at 6 weeks for a patrol 1600nm away. By that time, the conflict might be over, so the drones are to be used for an initial strike, or kept in reserve to act when needed, but they are very much single-use assets.
Weaponry
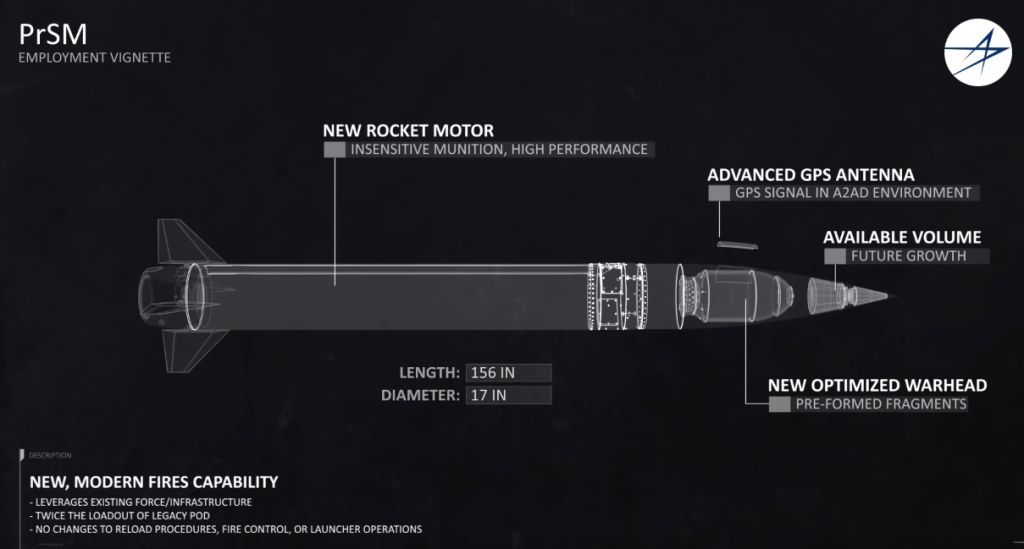
As explained above, since the drone can be sacrificed, it can use weapons that follow a ballistic trajectory. The concept is based around the Precision Strike Missile, or PrSM, a new US long-rocket missile that can hit targets 500km away while only having a length of 4m and a diameter of 43 cm. It is being developed for ground launch by the M270 and Himars multiple rocket launchers, and launching it from a closed tube would probably require adding a small explosive charge at the base to achieve a cold launch. Future evolution are planned, with a range increased to 700km, and a seeker to target ships and ground vehicles. The cost is estimated at around 1 million US$ per missile, not much cheaper than a Tomahawk cruise missile, which comes in at 1.5M$ but has a longer range.

Interestingly, the warhead of the PrSM can be swapped out for a small airborne drone, as part of the Vintage Racer program. The drone can then loiter in the target area for 60 to 90 minutes to find targets for the other missiles.
The mass of the PrSM is not public, but the mass of its predecessor, ATACMS, which is twice bigger, is, and is 1600kg, so I am assuming 800kg per PrSM. For 16 missiles, that amounts to 13 tonnes. Since the silos are inside the pressure hull (except for a small section at the end that has to be reinforced), they do not have to withstand the water pressure and can be thin so I ignored their mass. Putting 16 PrSM angled at 45° in a 8×2 configuration takes 8m of hull section, however to keep the center of gravity at the same place after the missiles are launched I split them into two groups placed at equal distance from the center of gravity.
In order to launch the missiles, the drone would have to surface, as the PrSM is not designed for a subsurface launch.
Propulsion
The propulsion system chosen is the key to the survivability of the drone. It is based on Naval Group’s second-generation FC2G AIP system. This system uses oxygen and hydrogen to power a fuel cell, that provides electricity to power the ships. Oxygen is stored in liquid form at cryogenic temperature. Liqui hydrogen is however much harde to store, because it requires much colder temperatures, making the tanks brittle, and because of the small size of the H2 molecule, it leaks even through solid metal. So instead, Naval Group extracts the hydrogen atoms from standard Diesel fuel through a process called reforming.
Naval group provided the following figures for the FC2G: it is able to power a 6m-diameter submarines for 3 weeks at 3 knots, producing 150kW of average electric power and up to 250 kW peak power. The combination of the reformer, the fuel and the oxygen tank fit inside a 8m section that can be added to the submarine. Based on the 3D view of this section, we can see that the reformer+ fuel cell takes 5,5m, and the rest is filled by a 20 cubic meter oxygen tank. The mass of the module is not provided. Naval Group’s previous AIP, called MESMA, consisted of a 200 ton section for a similar-sized submarine.
To size down the module for our 3m-diameter submarine, there is a easy formula: for submarines of similar aspect ratio (ie length/diameter), and having the same cruise speed, the required power is proportional to the cross-section. That means it goes with the square of the diameter. Our drone has an aspect ratio of 10, which is the optimal value for a submarine, and thus full-size submarines have the same ratio. Since it only has a diameter of 3m, it has a 4 times smaller cross section, so only needs to generate 38kW of electrical power to cruise at 3 knots.
Now assuming the power and mass of the AIP machinery are proportional to the output power, that means we only need a quarter of the volume, which, in a 3m-hull, require a 5.5m section. Based on the mass of the MESMA tranch, an upper limit of the mass is 50 tons, and probably much less than that.
Regarding the conversion of electrical energy into actual propulsion force, a 100kW electric engine pod weighs less than 200kg, so it is negligible. A standard combustion Diesel engine could also be added, along with a snorkel, as a safety mode in case the AIP fails or the drone runs out of oxygen, or for port operations at higher speed. A Diesel engine delivering 350kW of power continuously, which can power the drone up to 6 knots, weighs around 1400kg and consumes 100L/h at that power.
Alternatively, instead of Diesel fuel reforming to produce hydrogen an run it through a fuel cell, a stirling engine could be used. It is a thermal engine that need oxygen and a source of fuel an burns them. Such as solution in used in the AIP modules of German, Japanese and Swedish shipyards, usually by using methanol or ethanol.
Tank sizing
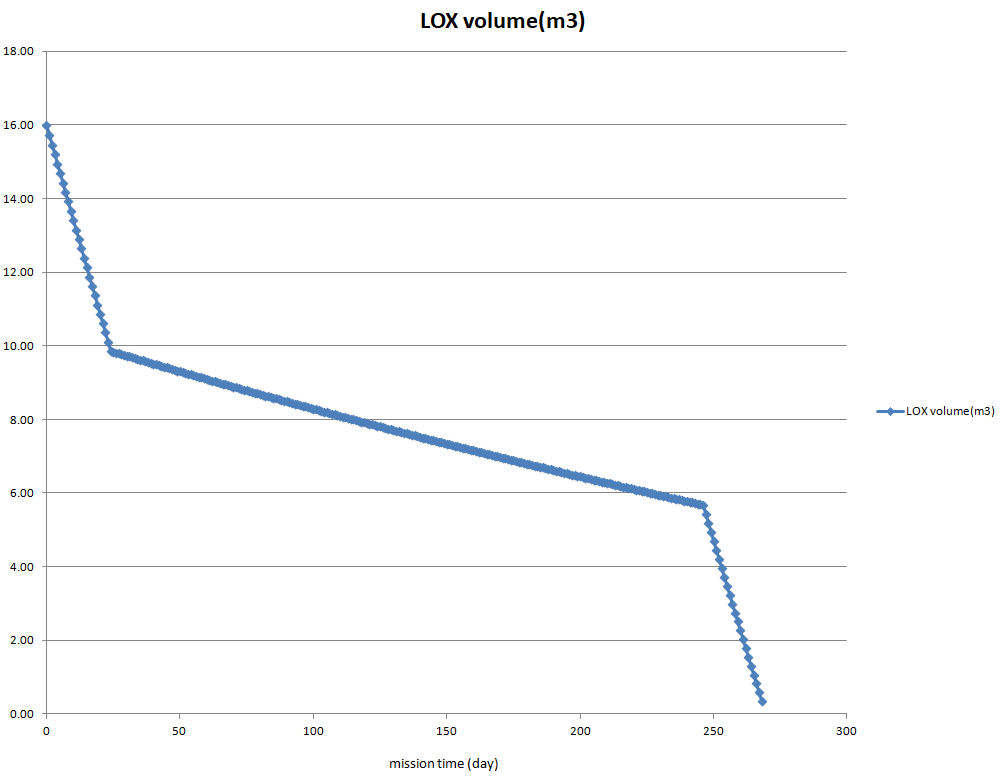
To give the drone a long endurance, large tanks of oxygen and Diesel fuel are required. The sizing can be done based on the figures from Naval Group: with 20 cubic meters of liquid oxygen, they can power a 6m-diameter submarine at 3 knots for 3 weeks. Our 3m drone has 4 times less drag, so 4 times less resource consumption at the same speed. This means it can cruise 12 weeks at 3 knots on 20 cubic meters of oxygen.
The resource consumption is proportional to the required propulsion power, which in turn depends on the cube of the speed. This means at 1knot, the consumption is only 1/(3^3)= 1/27 of at 3knots. So very little resources are needed once the drone is loitering on-station. Overall, with 16 cubic meters of oxygen, the drone can cruise at 3 knots for 3.2 weeks, crossing 1600nm or 3000km, then loiter at 1 knot for 88 weeks, and then head back to its home port at 3 knots. This, however, overestimates the endurance, because oxygen tanks have a small loss rate. With a 0.13%/day loss rate, realistic for a tank this size, the on-station time is reduced to 32 weeks or 8 months. That makes for a total mission duration of 38 weeks, in which the drone spend 83% of the time on-station.
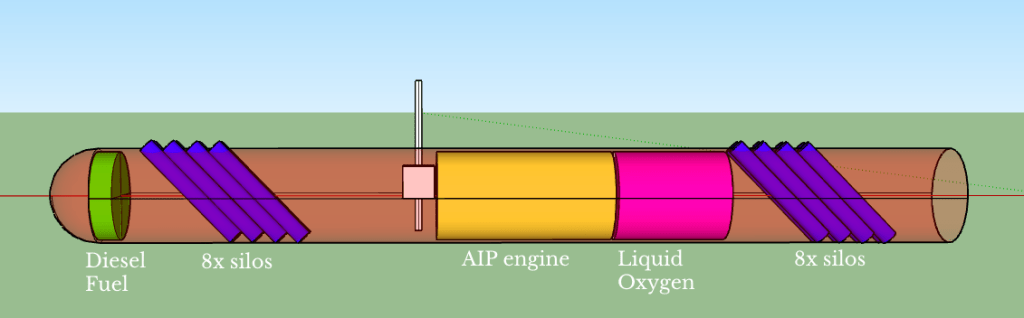
16 cubic meters of liquid oxygen has a mass of 18 tonnes, and, using an inner tank diameter of 2.5m as cryogenic tanks use multiple layers of insulation, takes a 3.3m hull section. I put it aft of the drone, with the Diesel fuel tank at the bow. That way, when they drain, the center of gravity does not move too much.
Regarding the Diesel fuel tank, for the sizing we need to know the proportion of Diesel consumed for a given mass of oxygen. The overall chemical reaction happening between oxygen and Diesel, including the reformer and the fuel cell, is
4C12H23 + 71O2 → 46H2O + 48CO2
That gives a ratio of 0.29kg of Diesel consumed per kg of oxygen. We start with 17.6t of oxygen, but 17% of it will be lost due to tank losses, so we will only run 14.6t of it though the AIP, and for that we need 4.2t of Diesel. Diesel has a density of 0.8, so that fits into a volume of 5.3 cubic meter, which fills a 0.7m section of the hull. Since we do not need to store it in a cryogenic tank we can used the full hull diameter. I placed the tank as close to the bow as possible, to balance out the oxygen tank, so that the center of gravity does not move too much as the tanks drain.
For the alternate propulsion concept with a Stitrling engine, assuming an engine efficiency of 0.36, a liquid methane-liquid oxygen set of tanks would take 9.7t of liquid methane, taking up a 3.3m segment of the hull, and 39t of liquid oxygen, taking up a 5.0m section. For an ethanol/liquid oxygen set of tanks; the numbers are similar: 19t of ethanol taking up 3.3m, and 39t of O2 taking up 5.0m.
Hull
The pressure hull of the drone is made of the same high-elasticity HY-80 steel as the US nuclear submarine. Those have a 5cm thick hull, but the required hull thickness for a given depth is proportional to the diameter of the hull, so the drone only needs a 2.5cm hull to dive as the same depth. A much thicker hull could also be used to dive to much higher depth and even reach the oceanic floor at several thousand meters deep, but then the hull would be much heavier: the 2.5cm hull already weighs 57 tonnes.
An alternate design is to not use a full-length pressure hull, since there is a lot of empty space inside the hull, and we do not need the buoyancy volume. The missile sections could be replaced by sections with no pressure hull but with pressure-hardened silos. However that requires a bit more thinking in how to keep the center of gravity centered when the tanks empty. Making each tube as thick as the pressure hull would add 16 tons to the overall mass of the sub. Similarly, the diameter of the hull could be reduced. Then the missile tubes would protrude out of the pressure hull, so they would have to be reinforced.
Since the best way to detect the drone is with sonar, and especially active sonar since the AIP is designed not to be noisy, it is important to take countermeasures against it. The hull could be coated with anechoic tiles to absorb incoming sonar waves. Another option is to use an hexagonal pressure hull cross-section instead of the circular one: when viewed from the side, the circular hull always has a part of it that is perpendicular to an incident sound ray, and consequently reflects it in the same direction, ie the direction of the enemy sonar system. An hexagonal hull is never perpendicular to the incoming rays, except at two very specific angles. However the physics of sound propagation in the water restrict the range of angles a long-range sound rays can take, so by choosing the hull shape carefully all sound rays can be deflected in practice. An hexagonal hull can reduce detection distance by a factor of 3 compared to just anechoic coating.
Hexagonal hull forms are not used for pressure hulls because they do not withstand pressure as well as circular ones, but they can be used on an outer hydrodynamic hull. However simply adding a thin metal outer hull does not work, since the low-frequency sound waves still go through it. It has to be made fully reflecting by adding a special ‘transmission loss” coating.
Electronics

The final subsystem to consider is the set of sensors and communication links the drone is fitted with. Regarding the sensor, it is tempting to give it a high-performance passive sonar to enable it to detect enemy ships and submarines. However, that would be costly, and in the absence of a human intelligence aboard, it is hard to act on this information. It would either have to be relayed to the drone’s command center, or a computer system would have to be installed inside to emulate a submarine commander’s intelligence. I do not think artificial intelligence is there yet, and as a cost-saving measure I think the drone should only be outfitted with a sonar intercept system, able to detect the pulses from enemy active sonars. That information is interesting even after the mission, to know if the drone has been tracked and modify its deployment pattern. A simple rule that the drone should move away from sonar sources is also a good way to enhance its survivability. An intercept system does not have to be as sensitive as a real sonar (since for a real active sonar, the sound has to get to the target and back, whereas the intercept system only incurs the losses of a one-way trip), so they are not very large and not very expensive compared to a towed sonar array or large flank or bow arrays. By distributing several small sensors across the hull, a good active intercept system can even estimate the distance of the enemy emitter.
Another interesting sonar to have would be a high-frequency sonar. High frequency waves are quickly absorbed by the water so the range is short, but they are high resolution and are useful to detect if there is a ship in front of the drone before surfacing or getting to periscope depth. That is useful to avoid collisions.
Regarding communications, although submarines are very infrequently able to communicate, they have a wide range of radio links:
- Very Low Frequency (VLF) antennas are able to receive signals through the water, but they must be very long, so they are usually towed behind the boats. They have a very limited throughput, and require very large radio stations on land to work. The submarine can thus only receive information, but can do so from anywhere on the planet
- Satellite communication (SATCOM) only works from above the surface, so the satellite antennas are put on a periscope or a buoy towed by the submarine. They can provide very high-speed communications all over the world, but satellites can be vulnerable to jamming and other forms of attack.
- Standard Very High Frequency naval links also work above the surface, and can cross hundreds of kilometers, and even more with ionospheric bounces. The naval Link 22 uses VHF as its main carrier.
- Line-of-sight datalinks such as Link 16 have much shorter range, with ship-to-ship ranges possible only from a few dozen kilometers away. Plane-to-ship communications benefit from a wider radar horizon and can reach 300km.
Being at periscope depth make the submarine vulnerable to visual detection of the hull, and of radar detection of the periscope, so it is not a good idea. Nevertheless, the drone does not have to stay at periscope depth: VLF antennas can be used to “ping” the submarine, and tell it to get close to the surface and deploy its periscope. Buoys enable the submarine to stay deeper, but have a small radar signature so they probably still pose a risk against advanced radars.
So a good option is to have a towed VLF antenna (which can be attached to the drone shortly after it has left port, removing the need to reel it in and out), and a SATCOM+VHF mast. The drone does not have to communicate often anyway: it needs to receive orders to move to a new position or launch missiles, and does not have much to report back. It could report back the detections from its active intercept sonar from time to time to help mission planning (and needs to report if it knows it has been detected), and it also needs to confirm it has launched missiles.
For navigation, inertial units can give an accurate measurement but they drift over time, so they need to be reset regularly. This can be done with GPS, but to avoid getting to periscope depth other solutions are possible, such as using a high-frequency sonar to get an image of the sea floor and registering that on a known map, or using a high-precision magnetometer or gravimeter.
Finally, for port operations, it can be useful to have a dedicated mast with a navigation radar, navigation lights and a camera, for anti-collision.
Conclusion
A small uncrewed submarine drone carrying a dozen strike missiles is a good way for western navies to counter area-denial strategies and maintain a survivable and affordable strike capability against land and possibly naval targets. Each drone is cheap as the only advanced systems they carry are their Air-Independent Propulsion engine and their missiles, but their high level of stealth and their number make them very hard to track. There seems to be no technical roadblock, and the pressing operational need will probably overcome institutional resistances.

Hi, I just came across this post. Interesting idea! However, a few things may prove problematic.
Firstly is the munition. PrSM looks to carry a relatively small (~200lb) warhead out to 500+km. Based on your range circles and operating areas, there isn’t a ton of overlap between munition range and significant areas of the Chinese mainland. So in that theater, it would likely only be able to hit sea or coastal targets. In contrast, Tomahawks have 2-3 times the range and can reach deep inland targets.
The 200lb warhead limits the target set it can be used against. It probably isn’t very useful against large infrastructure targets like bridges, large buildings, or targets that require a lot of penetration.
Second, this UUV is VERY slow. Even at 3kts it may have trouble fighting against ocean currents if its going in the wrong direction. It may have to take sub-optimal routes too and from its operating area to minimize the impact of these currents. It may have to run at >1kt just to keep station. Both factors will reduce its time on station. Currents might even prevent it from taking station in certain locations, when launched from, say, Guam.
Third is CONOPS. Presumably these are meant to deter to possible enemy actions, but I struggle to determine how many aimpoints we’d need to threaten, their location and type, and the pace of strikes that would effectively deter China. It’s a huge country. They may see a few dozen, or even a few hundred, small strikes as something they could just ride out.
Instead, we may need on the order of thousands or even tens of thousands of large munitions with long ranges that can reach any target in China before they consider this a significant threat. For example, there are some 40 military-use, Chinese airfields within range of Taiwan. If we could credibly threaten all (or most) of them with shutdown-level strikes on Day 1, and follow-up strikes to keep them shut down, maybe it would change the Chinese calculus.
Also, since these UUVs are so slow, they’re really only useful for Day 1 strikes. They won’t be able to maintain a pace of strikes over time. It takes weeks for them to sail back and forth to base.
Now obviously such UUVs wouldn’t have to bear the full burden of deterrence. But do they add enough to be worth the cost?
LikeLiked by 1 person
Thanks for your detailed comments, I agree with the points you raise. 500km range is indeed a bit short to strike deep inland, especially if you maintain standoff from the shore to widen the area the enemy has to search. Future increments of PrSM should reach 700km though.
Regarding speed, you are right that you need to take into account currents. I don’t think there is a lot of current in the Med, but in the Pacific I don’t know.
LikeLike
“The Gulf Stream in the South Atlantic and Kuroshio in the North Pacific are 50-75 km across and can flow at speeds of up to 3-4 km per hour (1 m s-1), but can be as fast as 7 km per hour ( 2 m s-1).”
https://seos-project.eu/oceancurrents/oceancurrents-c02-p04.html
They appear to be pretty variable (as one would expect). 3 km/h is 1.6kt. 7 km/h is 3.7kt. So the max speeds are a bit higher than the loiter & max speed of the UUV.
Currents in the SCS are more swirly and variable, but given the UUV’s slow loiter speed, they still could come into play.
If anything, currents may provide Chinese ASW forces a means of limiting their search area. They may be able to consider areas with high currents, in a non-favorable direction, as less likely UUV zones and focus their efforts elsewhere.
LikeLiked by 1 person