
This post is a bit of a notebook of mine, to help understand how bistatic radars can help detect stealth fighters.
A bistatic radar is one where the emitter and the receiver are not on the same platform, by can be separated by a long distance.
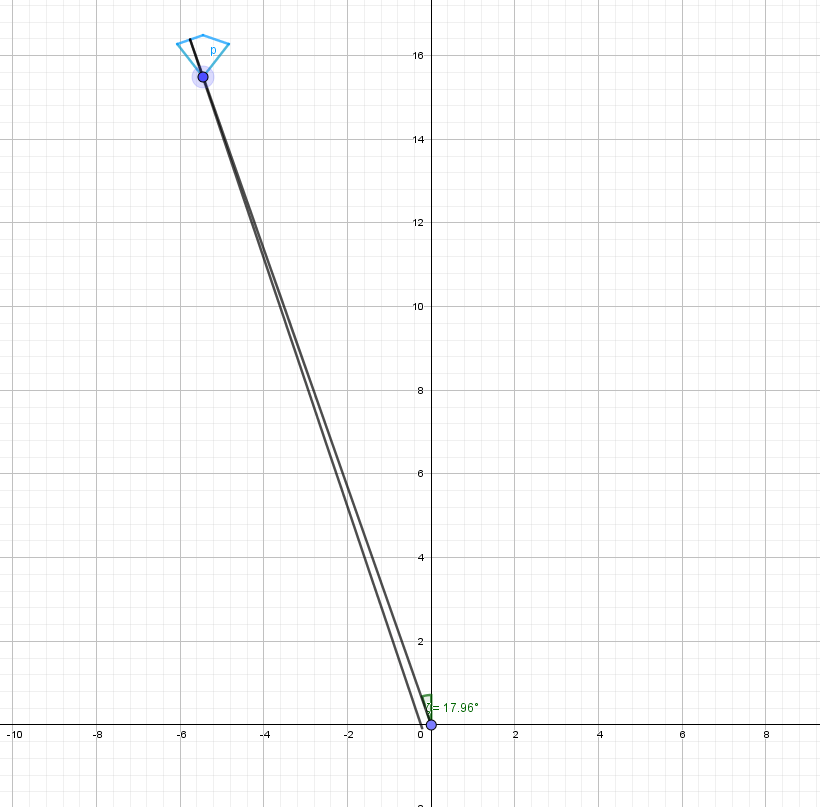
To model things, let’s consider a generic stealth airplane. It is diamond-shaped, with a leading edge half-angle of 38° and a trailing edge half-angle of 73°. These angles are based on the F-22 wing shape:

And here is the diamond-shaped model:

My radar signature model is that each edge reflects incoming radar rays, with the same angle of incidence as they as the incoming ray. Ie, for each incoming ray, take the reflection of it compared to the perpendicular edge to the surface, and that gives you the outgoing ray.
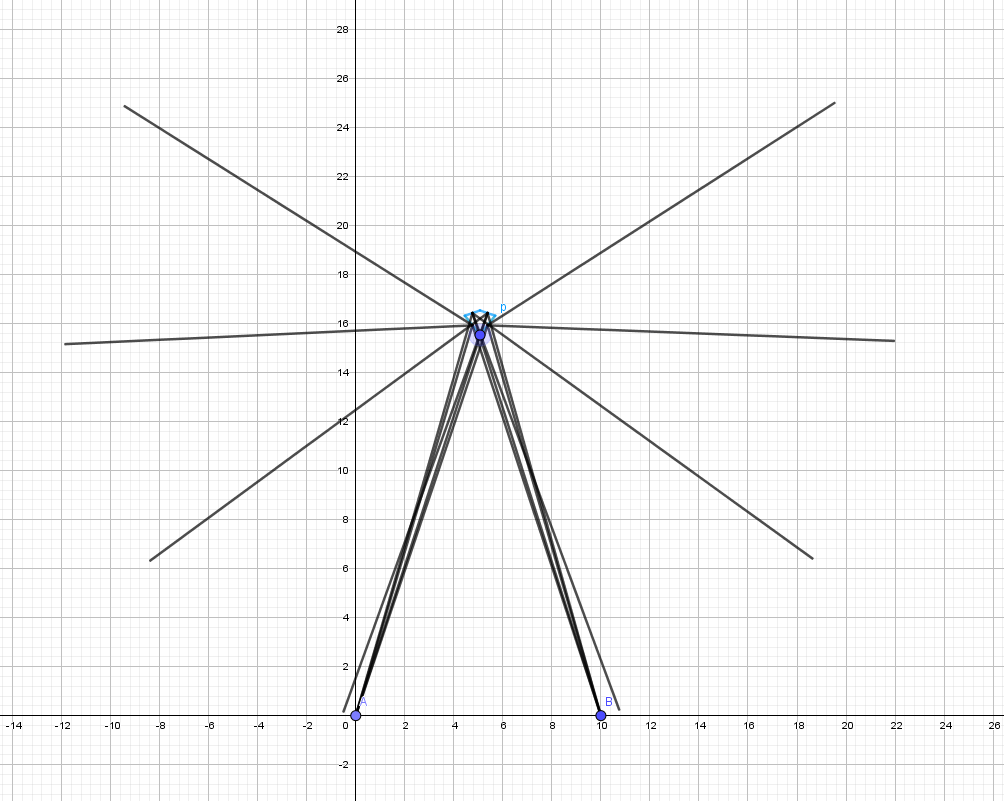
In a monostatic case, when the emitter and the receiver are at the same position, all the reflections point away from the receiver when the stealth aircraft is going head-on towards the radar:

Here the radar is at the origin of the axis, and the stealth target above in blue. The 4 lines going from the stealth target are the reflections. Here is a closer look at the reflections:
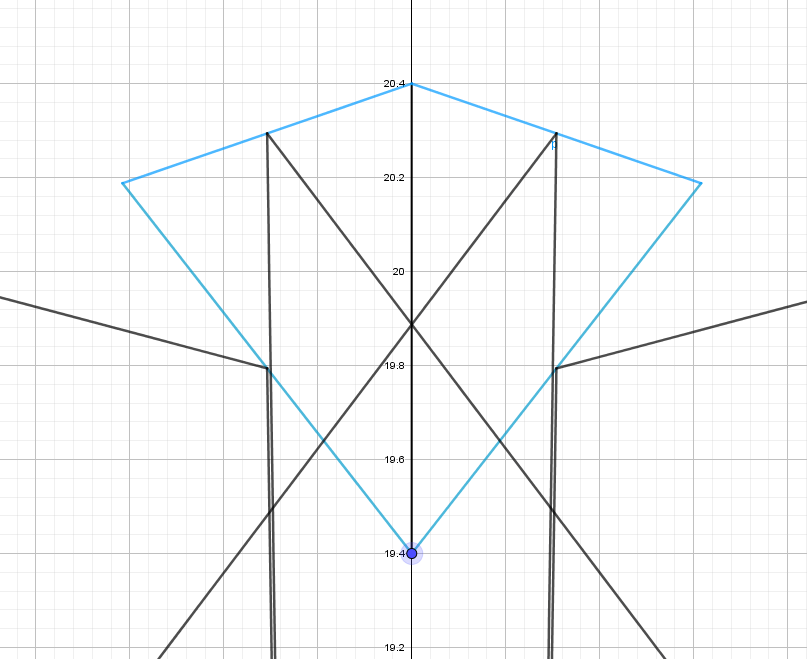
No reflection point towards the radar, so the radar return is 0, and the target cannot be detected. In fact, it can only be detected at 4 specific angles of +-52° (reflection on the leading edge going back to the radar) and +-17° (reflection from the trailing edge)

The target knows this and will adapt its trajectory to never show these angles towards the radars it has detected. So it will be completely invisible. That’s not actually true with a complete RCS model, but it is a good first-order approximation.
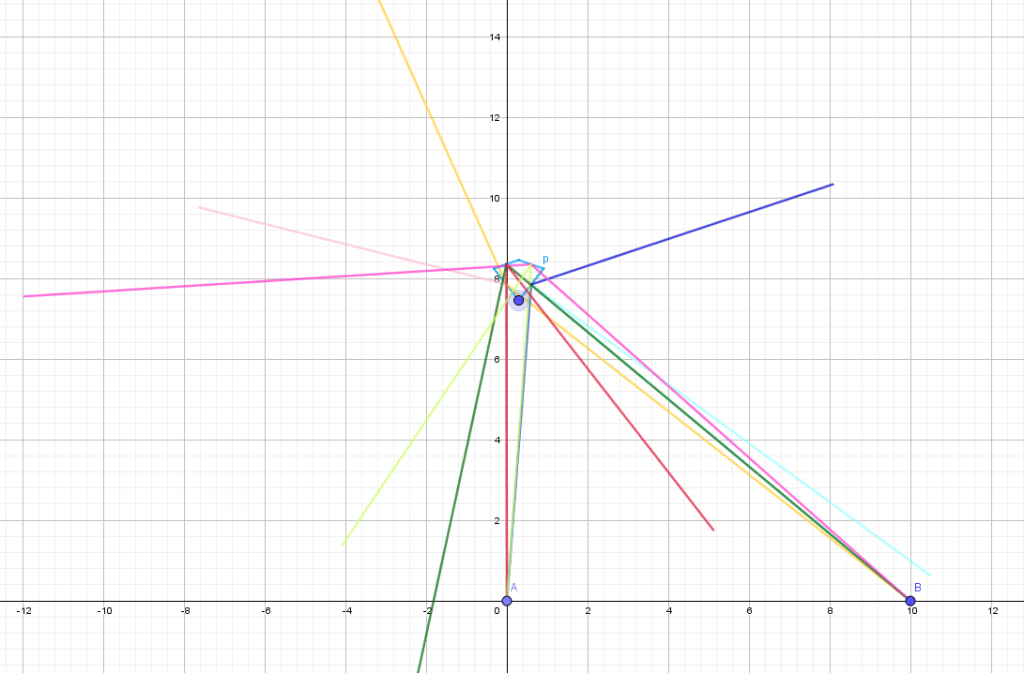
Let’s add a second radar operating in bistatic mode, both active (to receive signals from the first radar) and passive (to send signals to the first radar). There are now 8 reflected rays:
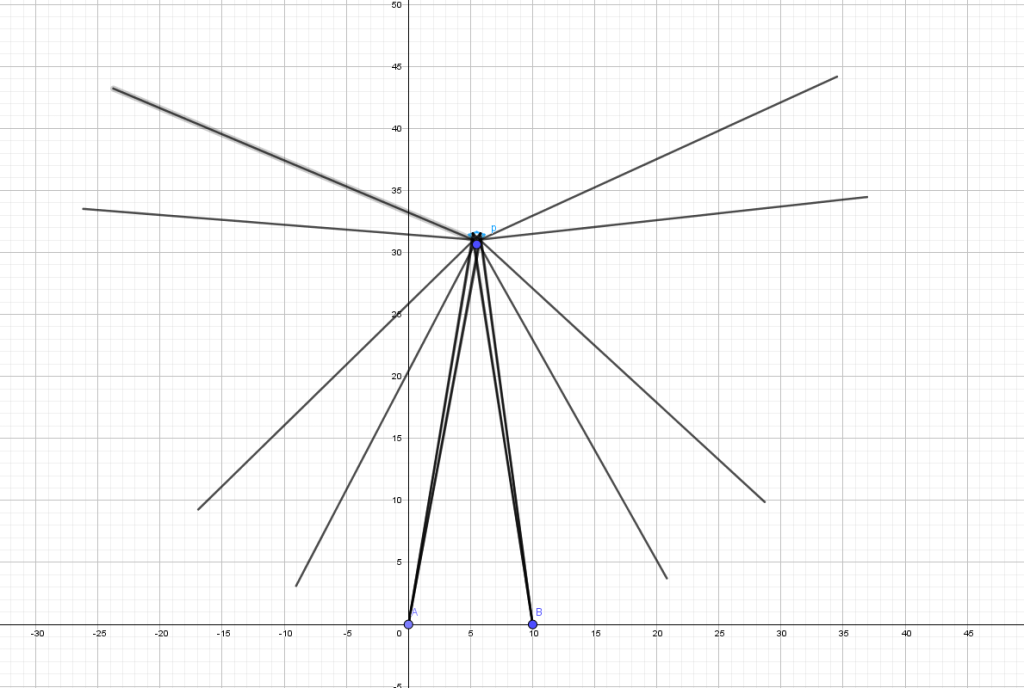
The problem is harder to analyze because the reflections depend on the position of the target relative to the two radars, and no longer on just the angle to a single radar.
Let’s start by assuming the target is trying to pass in-between the two radars. At long distance there is no reflection, which is to be expected since we are almost operating in the monostatic case;
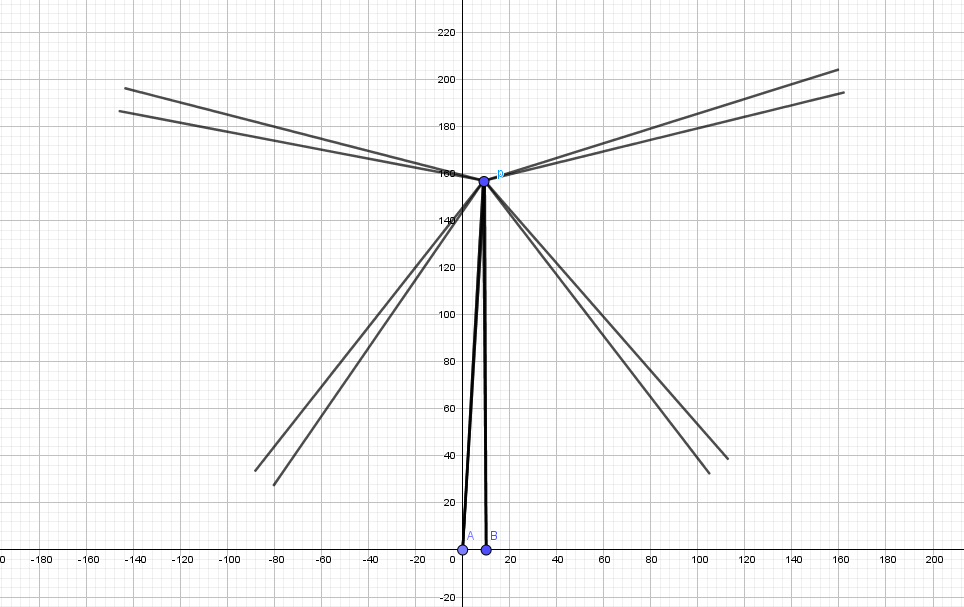
As the target approaches there is a reflection (at a distance of 1.6 bistatic baselines)
However it’s just a monostatic reflection from the trailing edge

And at 0.35 baselines there is the reflection from the leading edge:

And that’s all, so bistatism is not useful for that target trajectory.
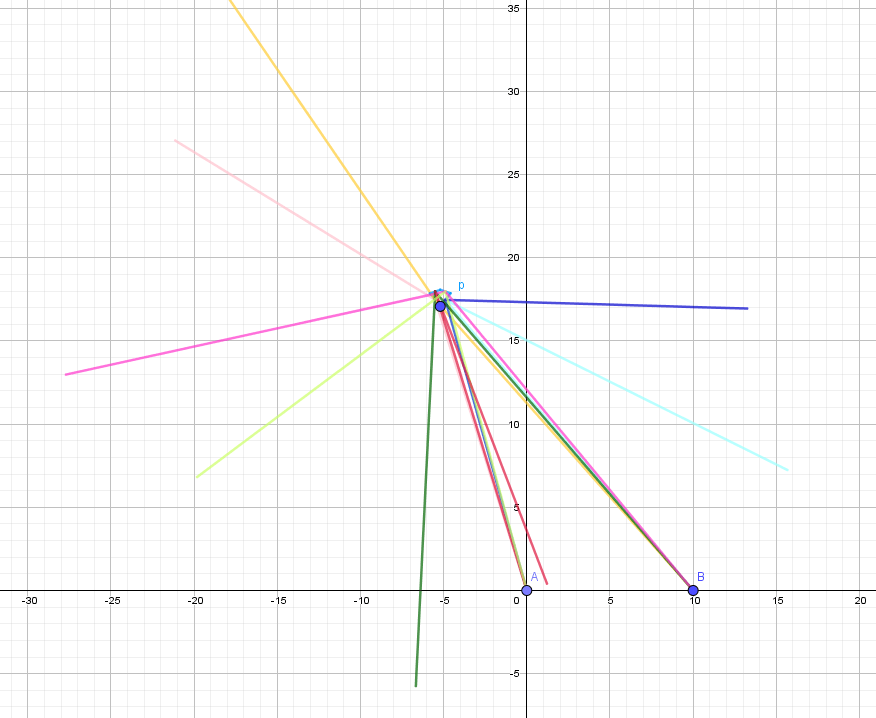
Now if the target is coming straight down but passes on the side of the radars.
We get first a monostatic detection from the trailing edge (dark green)

Then a bistatic detection from the trailing edge (red and dark green, bistatic detections always come in pairs):

Then monostatic from the leading edge (cyan):
And that’s it. So not a huge benefit from bistatism.
For another configuration, where the target does not pass between the radars but around them, there is a monostatic detection from the trailing edge at long range (dark green)
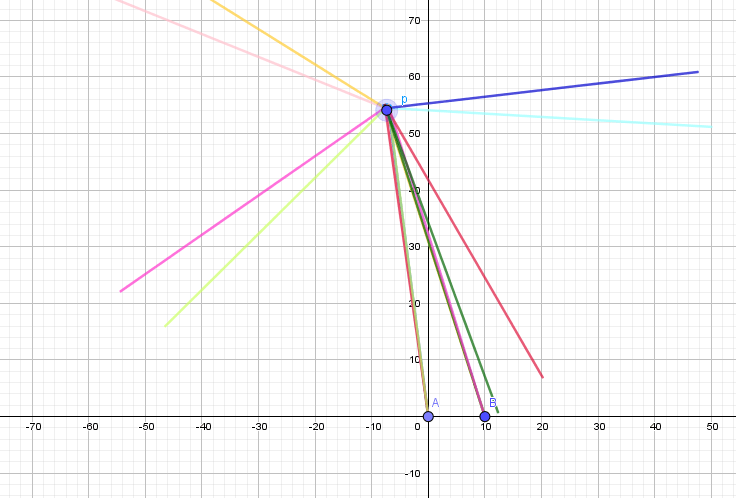
Then a bistatic one from the trailing edge (red and dark green)
Then monostatic again for the trailing edge (red)
Then monostatic from the leading edge (cyan)
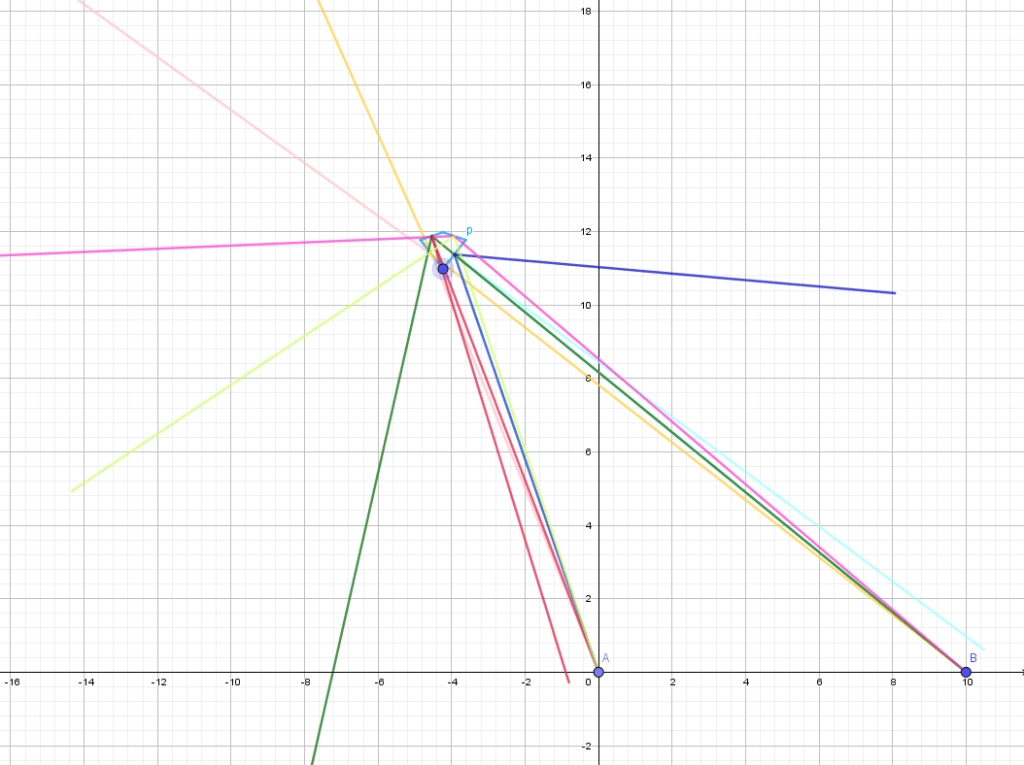
Then bistatic from the leading edge (cyan and dark blue)
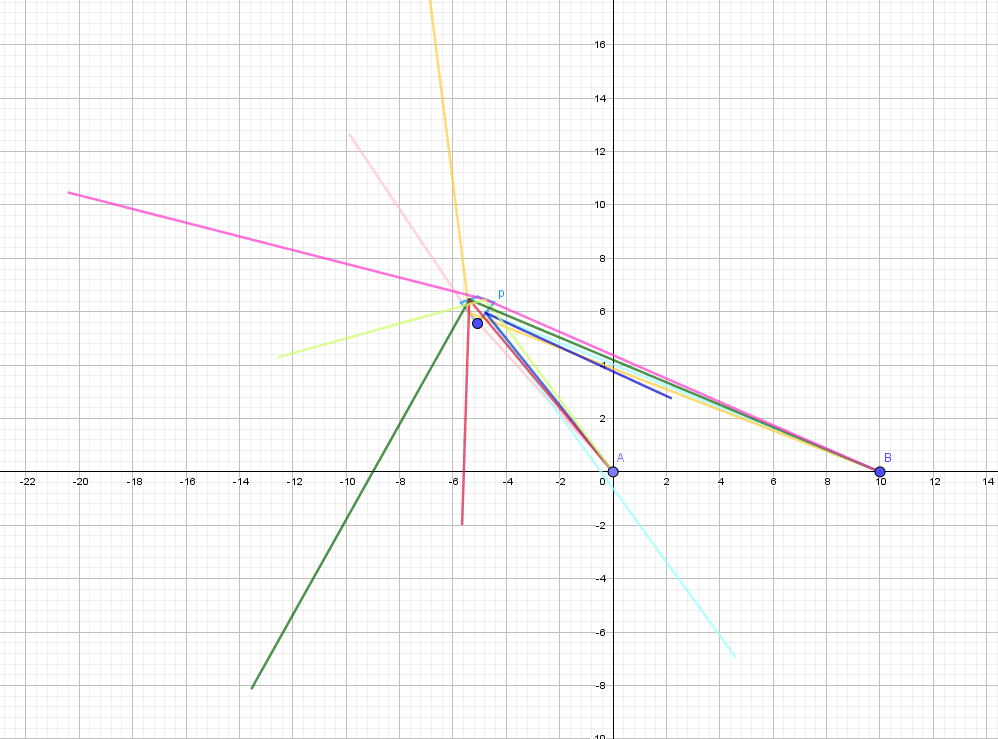
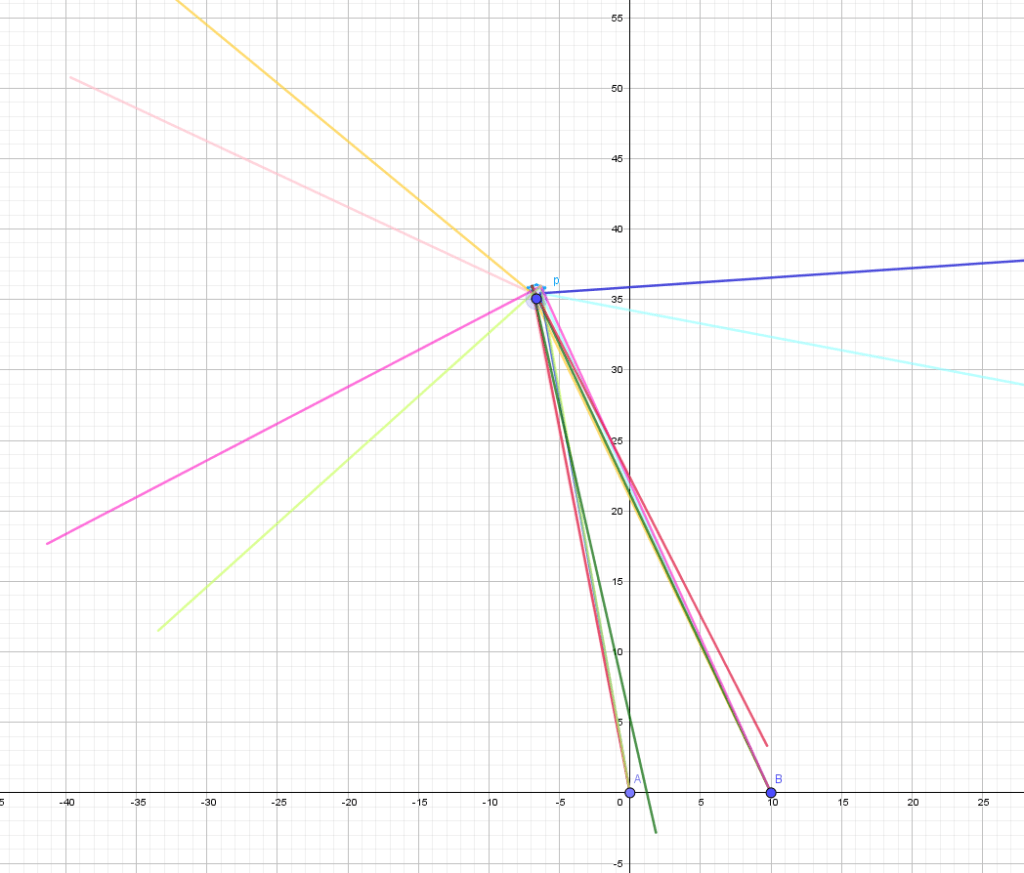
So at maximum you have two monostatic and two bistatic contacts. However, if you add more platforms, you can get a better gain from bistatism. Here is with 4 platforms, target passing around the radars. At long range, we get the quasi monostatic case:
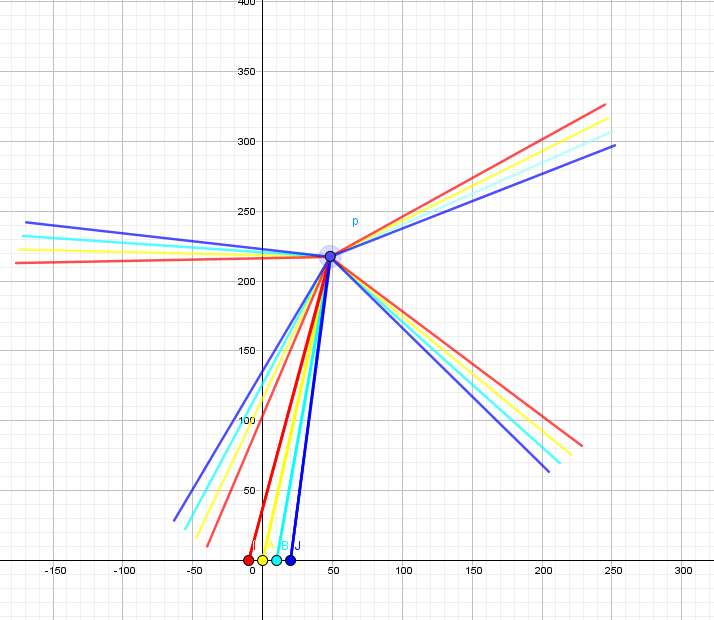
As the target gets closer we get a first monostatic detection on red

Then red-yellow bistatic
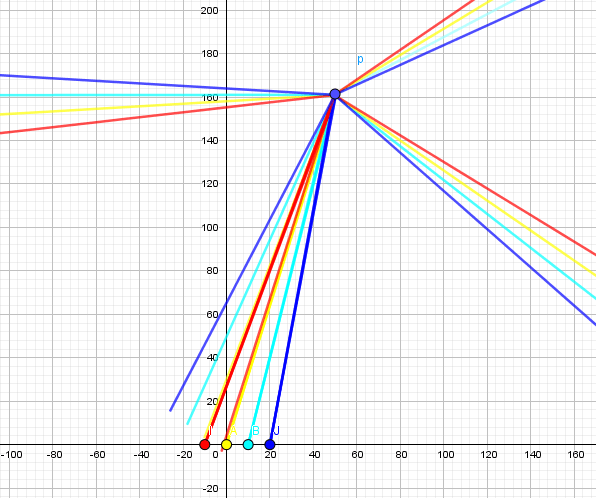
Then yellow monostatic
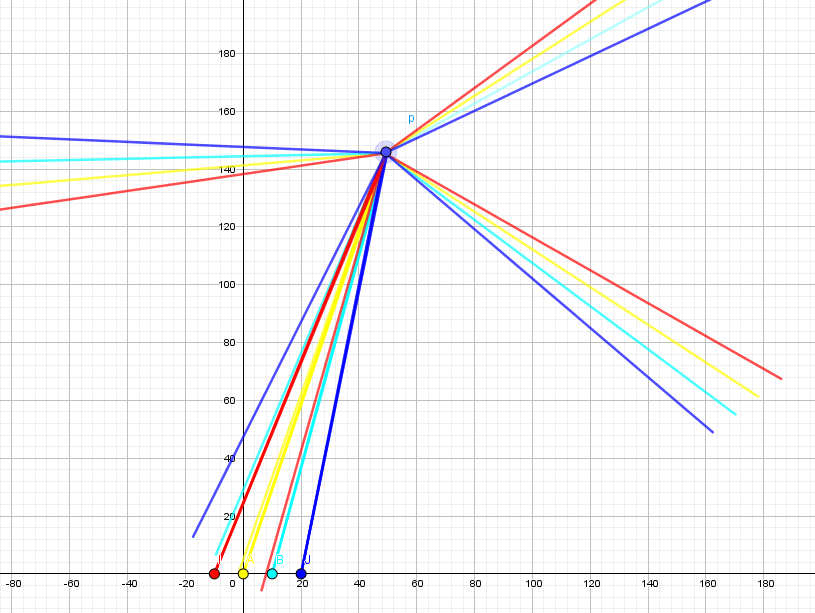
Quickly followed by red-cyan bistatic
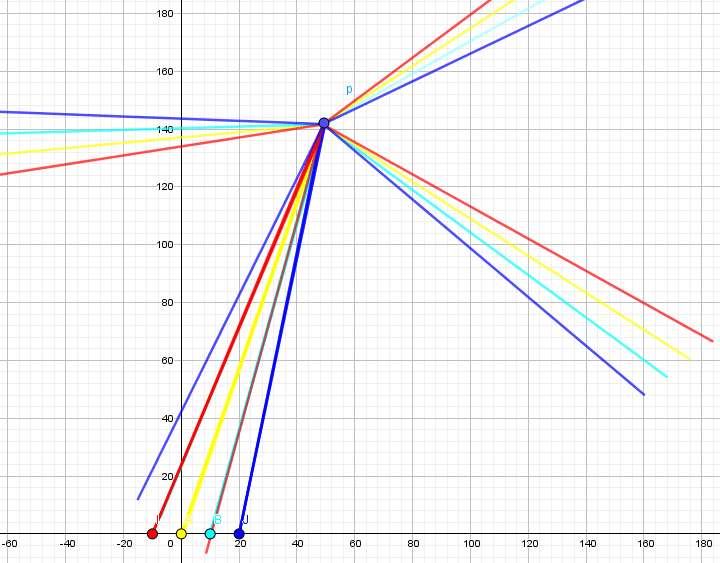
Red-cyan and yellow-blue bistatic

Cyan monostatic and yellow-blue bistatic

blue-cyan bistatic
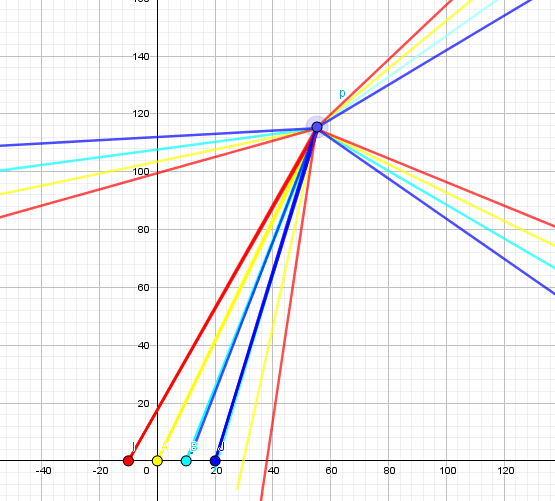
blue monostatic
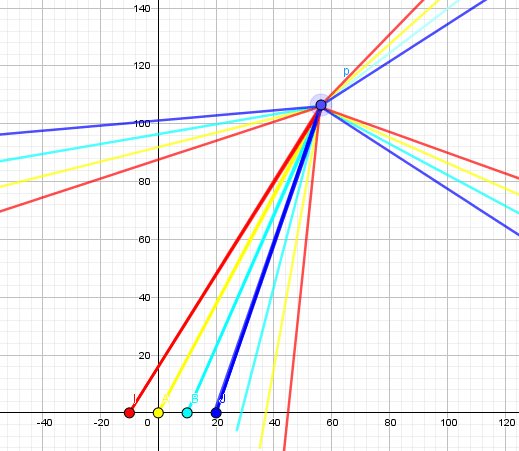
So we get 4 monostatic contacts and 6 bistatic ones in this configuration. In the general case with n platforms there are n monostatic contacts and up to n*(n-1)/2 bistatic ones. So the more platforms, the better. Military jets typically operate in flights of 2 or 4 though.
Another advantage of bistatism is that you can have only one of the platforms in active mode, with the other receiving but not emitting. Then, the stealth target does not know which angles should be avoided, unless it uses it own radar to detect the passive receivers. But that makes the stealth target not stealthy any longer.
A realistic simulation would use a flight of stealth platforms against a flight of bistatic platforms, with appropriate tactics. Both sides would probably use a formation with one platform in the back, with its radar on, to gather information while avoid giving up the position of the closer platforms. Then, the stealth platforms can know what angles to avoid, but that put a big mental workload on the pilot. The plane’s interface could tell the pilot when to maneuver and in what direction to help reduce this workload.
