
Following Fun with the Breguet equation: reverse-engineering cruise missiles , this is another math-heavy, lockdown-induced post, this time about the basic equation modelling gliders in the atmosphere. And not this kind of glider:

but this kind:

and that kind:
Indeed, as long as something flies unpowered, it follows the same equations.
TL;DR:
Max range R of a glider before it hits the ground:
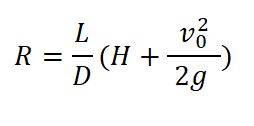
V0 is the initial speed (if it a air-launched missile, the initial speed depends on the speed of the launching aircraft and on the velocity increment given by the booster), g the acceleration of gravity, L/D the lift-to-drag ratio, H the initial altitude.
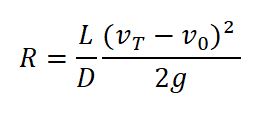
Max range of an intercept against a target of speed Vt and distance R at the moment of the shot:
Velocity loss of a glider in a high-g turn:

Δθ is the turn angle, Δv the speed lost to drag in the turn
All of these have been added to the list of useful equations for military system analysis
The rest of the post is the derivation of these equations, with some numerical examples illustrating the flight of an AMRAAM or a hypersonic glider.
Max range while gliding
The laws of mechanics tell us that

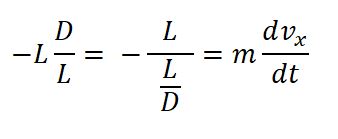
on the horizontal direction the only force is the Drag D so

We can express it as a function of lift L and of L/D, the lift-to-drag ratio, which depends on the shape of the glider. Soaring gliders used for leisure can have L/D up to 48, commercial airliners are around 15-20, a good hypersonic glider is slightly above 2.
L/D actually depends also on the angle of attack of the glider: at 0 angle of attack, there is no lift but there is drag, so L/D = 0. The L/D is maximized for a certain angle of attack, and gliders typically operate at this angle, since it gives the longest range.
On the vertical axis the forces are the lift and the weight of the glider. In level flight, they compensate each other. In real life, they might not: a glider flying too fast will have more lift than weight, so it will gain altitude. This gives rise to the yo-yo motion of hypersonic gliders: they go fast, so they have more lift than weight, so they rise. As they rise, the air becomes very thin, so lift disappears. Thus, they fall down, the air becomes denser, lift overcomes weight, and the cycle repeats (with smaller altitude gains each time). This is called a phugoid motion. On average though, the glider maintains a constant altitude so the lift and weight compensate.
So

Reinjecting it in the horizontal equation

The solution to this differential equation is

And consequently
This is a 2nd-degree equation of the type y=ax²+bx+c
So x reaches a maximum for
and for that time x is equal to the Range R of the glider
So with simplifications
Interestingly, this compares to the maximum range of a ballistic projectile without drag which is
So for L/D>2 the glider has a larger range than the ballistic projectile.
When allowing a drop in altitude for the glider the formula is
Fitting this to simulated AMRAAM data gives a L/D at high altitude of 0.95 (range 70km, initial speed 1200 m/s)
Turn performance
In a turn, the glider uses lift to change its trajectory, but since it cannot get lift without drag, it also experiences drag, which slows it down. How much speed does it lose?
We start again with
In a high-g turn, the forces are large compared to the weight of the glider, so we will ignore the weight. We will also assume the turn radius is constant.
Then in polar coordinates, the radial acceleration perpendicular to the trajectory is
and in the other direction parallel to the trajectory

With ω being the instantaneous turn rate
So on the radial axis
and on the other axis

We have two equations, and two unknowns, D and L. But we can also get rid of m and r by dividing one equation by the other (this is OK since drag is not null)
Giving
Or more simply
The solution to this differential equation is

and since
so

Thus
and
By integrating the turn rate we get the turn angle

We can express the velocity in function of the turn angle

So the relative loss in speed is exponential in the turn angle

For instance, with L/D=2.2, there is a 30% loss in speed for a 45° angle. This correspond to a medium-range hypersonic glider leveling its trajectory after reenter the atmosphere following an initial ballistic arc.
For L/D=1, representative of an AMRAAM, there is a 45% speed loss in a 45° turn, and a 30% speed loss in a 22° turn.
INTERCEPTION BY A GLIDER
In the situation where a glider, like an air-to-air missile, is shot with initial speed V0 at a target when the target is at range R0, and keeps a constant speed Vt, can the glider catch up to the target?
As seen before, the distance Xm crossed by a glider is

The distance Xt of the target from the initial firing point is
So the impact occurs when these distances are equal

This 2nd degree equation y=ax²+bx+c has solution when Δ=b²-4ac>0
So the limit point when an impact is possible is
So the maximum range Rmax at which an impact is possible is

and the impact occurs at time

For instance, in an air-to-air scenario where a fighter fires at an enemy fighter which is fleeing at roughly the same thing as the shooter, V0 is just the speed increment the missile obtains from its booster. Let us say it is 750 m/s, and the missile has a L/D of 1 (any resemblance to existing missiles is purely coincidental).
Then Rmax = 29km and Tmax = 76s
But if the same missile is fired by a fighter at Mach 2 against a target approaching at Mach 1, then the speeds add up, and

and Rmax = 140km and Tmax = 168s
So there is a ratio of around 5 in the ranges at which engagement can start! That’s why giving the range of a missile without specifying the engagement conditions is worthless.
Interestingly, the ratio in the ranges does not depends on L/D, but only on the speeds.
For maneuvering targets, a speed reserve has to be kept so that the missile can out-maneuver it. This makes the problem 2-dimensional, instead of the 1D modeling above. If the target changes trajectory when the missile is fired and the missile adjusts its trajectory to a new point of impact, then the velocity loss comes out of the initial velocity, and a new range can be computed.
No-lift trajectory
When using lift to stay at constant altitude, the gliders has a non-zero angle of attack, and thus experiences more drag than if it were at 0 angle of attack. The latter strategy has less range but loses speed less quickly since it has lower drag, so it can be useful to catch up to a fast target. What is the maximum range when using this strategy?
Newton still tells us
We will assume that the trajectory has a small angle compared to the horizontal, so the drag is applied in the horizontal direction.
So on the horizontal axis
The drag value is

with Cx the drag coefficient, ρ the local atmospheric density, A the frontal area of the object and v its speed. We will assume a constant ρ and simplify the expression as

So

The solution of this differential equation is of the form

and
so
and

Thus
On the vertical axis we have a free-fall without drag so with V0z the vertical component of the initial speed
Thus we can express z as a function of x with
Thus

and that’s an ugly equation. For x<<m/K it simplifies into the equation
which is the usual ballistic parabola
For x>>m/K it simplifies into
So the curve is very steep towards the ground, and at some point the speed is mostly in the vertical axis, so the assumption above that drag is mostly horizontal is not true. In that case, the missile reaches its terminal speed in free-fall (which can be quite high)
Unfortunately the solution to the intercept problem in general does not seem to have a nice solution in this case.
Real life
Air-to-air missile trajectory is a much more complicated matter than this simple modelling. For instance, drag rises a lot around Mach 1, and above Mach 1 the coefficient of drag decreases with speed, so it is a good idea to go fast. For longer range the trajectories are lofted, with a climb to get to higher altitudes where the air is less dense, and then glides from this altitude. This can be seen in these trajectories modelled by some flight sim enthusiasts who went ahead and modelled an AMRAAM with Computational Fluid Dynamics:
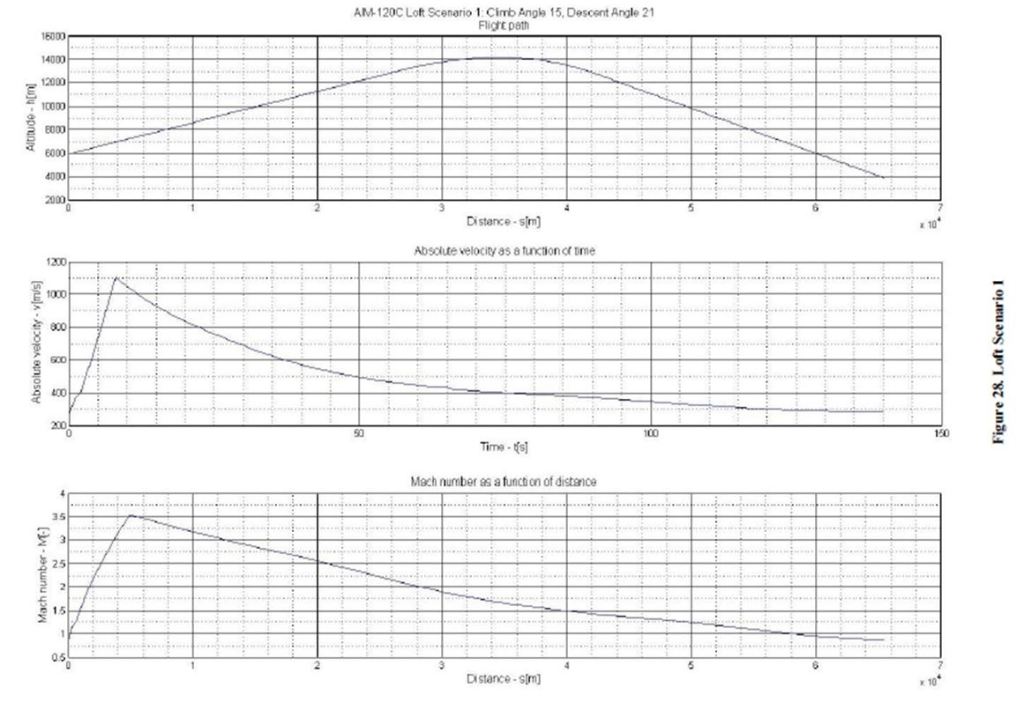
For a lofted high-altitude shot, the missile reaches its starting altitude around 70km after engine shut-off, and it is still going at Mach 1.25:


Thanks for these equations! I find them useful.
LikeLiked by 1 person