
Anti-Ballistic Missile defense (ABM) is and has been an important geopolitical topic: from the earliest days of the Cold War, the USA and the USSR looked for ways to defend themselves from nuclear bombs, and the introduction of ballistic missiles as their main vector spurred major work in the ABM field. This led to the Nike, Sentinel and Safeguards projects in the US, which never provided any real protection against a Soviet attack. Their cost, as well as the introduction of multiple, independently-targeted warheads (MIRV) -which meant a single ICBM could launch a dozen of warheads, plus decoys – put a nail in the coffin of these developments. In 1972, the USSR and the US signed the ABM treaty, agreeing that only two ABM sites per country were allowed, with a hundred interceptors. The USSR chose to defend Moscow, and the chose US to defend an ICBM launch site and then quickly gave up on the idea.
Ronald Reagan revived the idea in the 80s, with the SDI (also known as “Star Wars”) project, which was supposed to include on-orbit lasers and interceptors to form a shield against Soviet missiles. It was controversial at the time, and due to the fall of the USSR these exotic concepts were never deployed and the SDI was cancelled. However, ABM programs survived in a less ambitious form and in 2001, George Bush withdrew from the ABM treaty, and the US started fielding large ICBM interceptors in Alaska and California, as well as smaller shipborne and air-transportable interceptors.
In 2018, Russia revealed several weapons intended to defeat ABM systems: a nuclear-powered cruise missile, a massive nuclear-powered torpedo and a hypersonic glide vehicle. This suggests that Russia takes the US interceptors seriously, despite the fact that simple countermeasures are thought to make finding the warheads among the decoys impossible. This article is a look into the technical issues of ICBM interception, and into the credibility of ABM defenses againt long-range missiles.
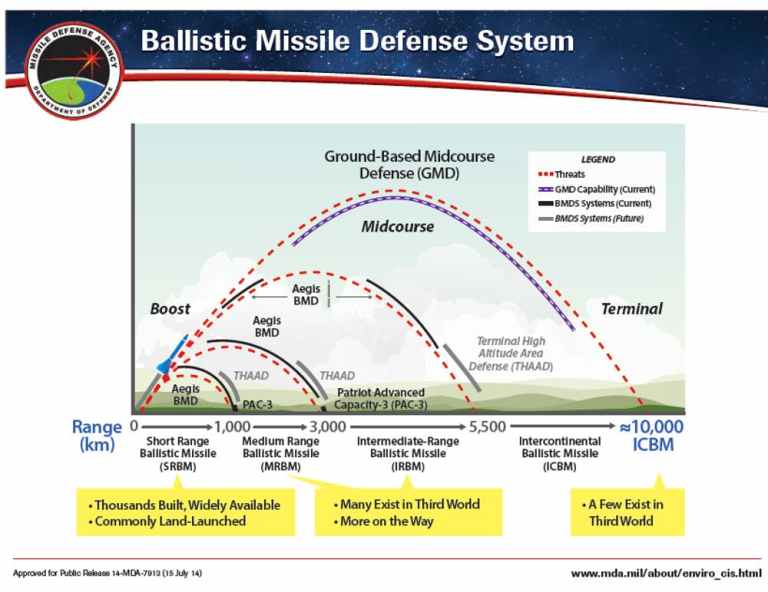
The threat
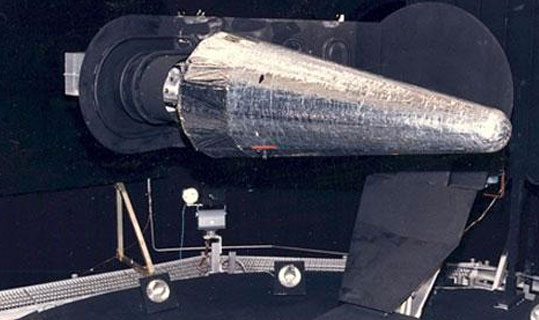
The target object to intercept is a reentry vehicle, which is deployed on a ballistic trajectory after the missile launching it has finished burning. It consists of a nuclear explosive, surrounded by a heat shield to survive atmospheric reentry at high speed, and typically has a conic shape and is around 1.5m long.
Warheads can be spun, so that they remain pointed in the right direction and do not start reentry too much on their side, which could destroy them or make them less accurate. If they are not perfectly balanced, the spin axis itself will slowly move along a cone.
Interceptions while the warhead is still on the missile are very challenging because the interceptor has to outrun it, so it has to accelerate very fast, and to be launched from quite close. In a typical scenario where ICBMs are carried by submarines at an unknown location far out at sea, or are stored in silos deep within the landmass of a country, this is not possible.
A typical ballistic trajectory looks like this:
The green disk is the Earth. Distances in thousands of kilometers
The trajectory is an ellipse, which starts and ends at an angle compared to the horizontal. That angle is smaller the larger the range is. Conversely, the larger the range, the larger the initial speed that needs to be imparted to the object to be on that ellipse. For a typical 10 000km trajectory, which crosses a quarter of the globe, the angle is 22.5° and the speed is 7 km/s. At its midway point, the trajectory rises 1400km above the ground. Other trajectories, with slightly lower or higher maximum altitudes are possible, but they require more initial speed, so a larger booster. However, a lower maximum altitude means that enemy radars see the warhead later, as their view is blocked by the Earth horizon for longer, which may be useful.
The threat cloud
Typically, a warhead is not deployed alone. The booster carries what is called a bus, which is a small, short-lived spacecraft that carries several warheads, and ejects them at the right place and the right speed so that they each hit different targets. Using several small warheads (around a hundred kiloton of yield, translating into an airblast radius of 3 to 4 kilometers) is more mass-efficient against extended targets such as cities than using a single, larger warhead. So the bus will disperse the MIRV on similar but not identical trajectories, by making speed adjustments following booster separation. The bus is much smaller than the booster so it carries little fuel and can only make limited speed changes. Here are some figures on the cost in speed (also known as delta-v) for different manoeuvres on a standard 10 000km trajectory:
| delta v (m/s) | |
| cross-range move by 4km (5psi airburst range for a 150kt bomb) | 2.80 |
| cross-range move by 20km (city extent) | 14.00 |
| along-range move by 4km | 1.16 |
| along-range move by 20km | 5.80 |
| move out 1km in 60s compared to the previous trajectory, then cancel velocity | 30.00 |
The bus can also carry decoys and other devices to confuse enemy defences, and place them on similar trajectories. If they are significantly lighter than warhead, many can be carried. These are often referred to as penetration aids or pen aids. All in all, what the defender sees approaching toward each target area is a group of object a few kilometers wide, called a threat cloud in US ABM jargon.
There is one public video of a Trident II bus manoeuvering:
The white cones are the exhaust gasses of the motors, which reflect sunlight.
Attacking the cloud
Since the cloud is a few kilometers wide and a 100kt bomb has a blast radius of a few kilometers, why not send one at the cloud and be done with it? The answer is that in vacuum, nuclear explosions are much less effective: there is no air to propagate a blast. In fact, the energy is released as radiation only. This energy can affect the target warhead in several ways: it can be dissipated as thermal energy in the heatshield facing the explosion, vaporizing some instantly. It can also be dissipated inside the fissile material of the bomb, where it can not start a chain reaction but can still make the material heat up and fizzle if the neutron flux is high enough. Finally, it can fry the electronics of the target warhead, making it a dud. Warhead designers try to harden their products to minimize those effects. This reduces the range at which a nuclear explosion is fatal to the warhead, so that one explosion cannot destroy multiple warheads.
Another form of attack against the cloud is to send kinetic impactors, that is to make a missile without any explosive payload collide into the warhead. The combined speed of the two objects is enough to destroy anything, but this requires a very precise interceptor with some maneuvrability and with a sensor, to close the distance in the final seconds. This is the solution currently chosen by the USA, whereas Russians use nuclear-tipped interceptors. A downside of using the latter is that they can create EMPs, blinding the defender’s radars.
Discrimination
Consequently, the ABM operator has two options: attacking every object in the cloud, or trying to find out which objects are the real warheads and shooting only at those. The first option is too expensive, since an ICBM can carry a half-dozen warheads and several times more decoys, it would bankrupt the defender.
The alternative is to build a system that can detect the small objects dropped by the bus, and differentiate (or discriminate) between the warheads and the decoys. That’s best done with a radar, as optical sensors are blocked by clouds. Typically two sets of radars are used, one in the UHF band for long-range detection, and one in the higher frequency X band for discrimination. Those radars can be cued by early warning satellites that detect the boost phase of the ICBM’s flight, but are mostly blind afterwards.

Modern radars are very sophisticated, and provide much more information than just the position of the targets. The MIT Lincoln Lab has been leading the development of discriminations techniques in the US and has published a handy historical summary:
In the bottom row, RCS classifier means analysing how strong the return from a target is, and how much it varies as it passes across the radar. Ballistic coefficient means estimating how much the target slows down due to air drag. Initially, those measurement were done using relatively long radar pulses, which means they were not very precise but did not require too much instantaneous power from the radar.
Resolution limits
In the 1970s, shorter “wideband” radar pulses were developed, enabling characterization of the length of the target. This is possible because the wider the radar’s bandwidth is, the higher its resolution along its line of sight (ie parallel to the radar beam). The formula for the range resolution ΔR is
 with c the speed of light and β the radar’s bandwidth, which is typically around 10% of the radar’s frequency, so around 1GHz for an X-band radar operating at 10GHz. Consequently, this radar will have a range resolution of around 15cm. So it will be able to discriminate decoys from warheads if the former are 15cm longer than the others, assuming both have their long axis pointed at the radar.
with c the speed of light and β the radar’s bandwidth, which is typically around 10% of the radar’s frequency, so around 1GHz for an X-band radar operating at 10GHz. Consequently, this radar will have a range resolution of around 15cm. So it will be able to discriminate decoys from warheads if the former are 15cm longer than the others, assuming both have their long axis pointed at the radar.
In the direction perpendicular to the radar beam, the resolution is much worse: the formula is for the cross-range resolution ΔX is
with R the range to the target, D the diameter of the radar’s antenna, and λ the wavelength of the radar, typically 3cm for an X-band radar. Thus, for a target 2000km away, the cross-range resolution is 5km, so it is 33 million times worse than the range resolution.
Finally, a radar can also use the Doppler effect to measure the speed of the target towards or away from it. For this, the resolution in speed ΔV is
with 𝜏 the time during which the target is observed. Keeping the same radar as above, and observing for 0.1s, gives a resolution of 15cm/s. The formula above are from the Union of Concerned Scientists’ Countermeasures report, appendix D. The whole report is a good introduction to ABM and discrimination issues. The US National Academies’ Making Sense of Ballistic Missile Defense report is also a good read.
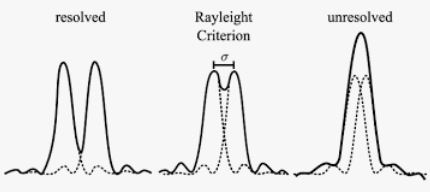
One important thing about resolution is that it measures in what conditions a radar can distinguish between a single object and two close objects. If they are closer than the resolution in every direction, these case cannot be distinguished. If there is at least one direction in which they are further apart than the corresponding resolution, the radar can tell them apart.
Tracking
This is different from the radars ability to track the position of an object: there are ways to know the position of an object with more precision than the resolution limit, especially if the object is tracked for a long time. Then, as a very large number of measurements can be averaged, the absolute position and speed of an object on a quasi ballistic trajectory can be known with a lot of precision. Typically, the accuracy after tracking can be a hundred times better than the resolution.
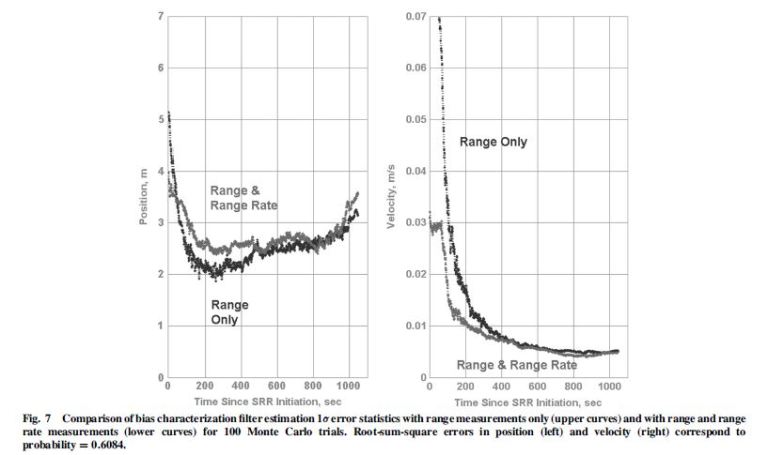
For instance, this Raytheon research paper shows that using a network of three radars, the position of an object can be known to 3m accuracy (in all directions, even cross-range!) after 200s of observation, and the speed to a 1cm/s accuracy after the same time and a 5mm/s accuracy after 1000s:
So overall, a radar with a wider bandwidth (so operating at a higher frequency), with a larger diameter and a longer observation time will have more tracking accuracy. That enables to assess more accurately the ballistic coefficient, especially after a long tracking phase, and to classify objects based on their length parallel to the radar beam. Still, this does not allow to take “pictures” of the objects to distinguish them if they have similar dimensions, due to the poor cross-range resolution of radars.
Range-Doppler imaging
Range-Doppler imaging, introduced around 1975, allows to beat that resolution limit by combining the extraordinary range and Doppler resolutions of radars. It’s based on the fact that if an object rotates from the point of view of the radar, then different parts of the object have different speeds, so different Doppler effects. Then, the radar can produce an image of the object with the resolution being the range resolution, and the resolution in the other direction depending on how much the target has rotated from the point of view of the radar during the observation time. The radar used as example above has a resolution in this direction of 0.4m if it observes a target for 10 seconds.
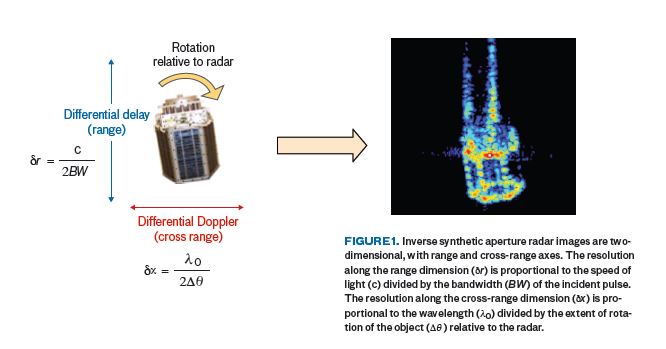
This technique is also called Inverse Synthetic Aperture Radar, or ISAR, and allows a precise characterisation of the size, shape and materials of a target. It is more effective the higher the radar’s frequency and bandwidth are, so the USA developed a series of research radars at increasing frequencies (see also these Lincoln Labs articles).

In order for a decoy to give the same ISAR image as a warhead, it must not only have the same shape, but also the same surface materials, because the red points in the images above correspond to strong radar returns and depend on the local reflectivity of the material. It also must have the same spin rate, otherwise it will give a different Doppler return. That means it must have a similar mass distribution as the warhead. That is starting to make for a complicated decoy, and that means it will consume some of the mass budget allocated to the warheads. So the best way to defeat imaging radars is not to make the decoys look like warheads, but to make the warheads look like decoys: then, the radar cannot tell them apart either. This is called using “antisimulation” decoys, and the Union of Concerned Scientists has produced a very good explanation video on how they work:
Basically, by using inflatable balloons with a metallic coating, the attacker deploy dozens of lightweight decoys with each warhead. Since the warhead is also encased in a similar balloon and radars cannot look inside the balloons, the decoys and the balloon with the warhead look the same to imaging radars. By adding a small battery and a heater to the balloons, and carefully choosing the coating, their infrared signatures can also be made impossible to discriminate.
Even the independent analysis of ABM effectiveness carried out by the US National Academies found that antisimulation decoys are a very serious threat to the US ABM system, and discrimination is far from guaranteed:
Whether decoys can be readily discriminated, particularly in the face of
antisimulation techniques, remains a contentious subject however. The combination of observations for more than 100 sec by an interceptor-mounted optical sensor that is closing on the threat complex, together with concurrent X-band radar observations and a firing doctrine that exploits the battle space available for Shoot-Look-Shoot engagements, offers the greatest probability of being able to separate real threatening objects from decoys
Ballistic coefficient
In a perfect vacuum, the trajectory of an object is an orbit that does not depends on its mass, its shape or its density. Consequently, a heavy warhead and a lightweight antisimulation decoy can have exactly the same trajectory, making it impossible to tell them apart based on their position or speed.
However, the space around the Earth is not completely empty: even above 100km, the traditional upper limit of the atmosphere, there is still enough air to slow down lightweight objects more than heavy objects. This is especially true in the initial and final parts of a long-range ballistic trajectory, where the threat cloud is only a few hundred of kilometers up. For instance, the warhead of a 10 000 km range ICBM is only 200 km up when reaches the final 500km to go to its target.
The Countermeasures report has a very interesting analysis of how much antisimulation decoys slow down compared to the warheads, depending on the mass (or more exactly the weight/drag ratio, also called the ballistic coefficient):
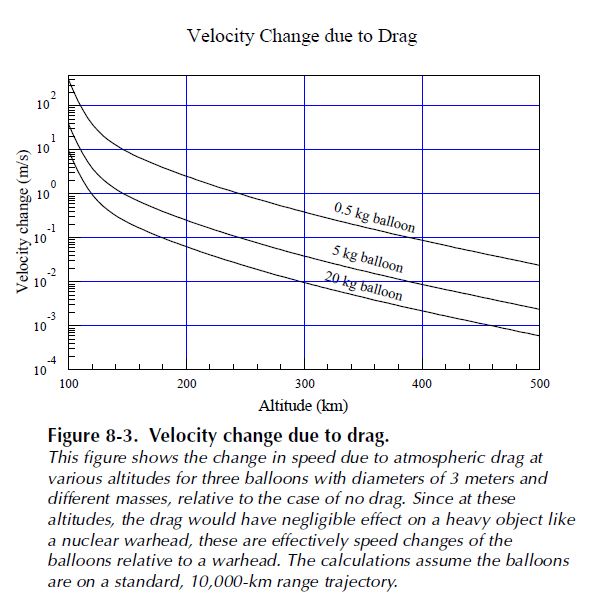
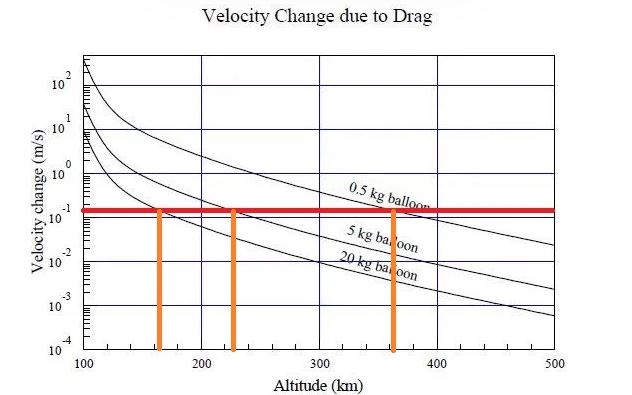
The graph reads as follows: a balloon with a diameter of 3m and a mass of 20kg (bottom curve) has slowed down by 5.10-2 m/s = 5 cm/s compared to a warhead when it reaches an altitude of 200km. By using the Doppler effect, a radar can easily discriminate the decoys when they slow down by more than 15cm/s for instance. This means this radar can discriminate a 0.5 kg balloon when it reaches 360km altitude (~800km/100s to go), a 5 kg one when it reaches 230km altitude (~500km/65s to go) and a 20kg one when it reaches 160 km altitude (360km/45s to go).
Using the 1cm/s speed accuracy after an extended tracking from the Raytheon paper above, the discrimination ranges are much longer:
The 0.5 kg balloon is discriminated at more than 500km altitude, the 5kg balloon at 390km and the 20kg one at 300km altitude (~700km/90s to go).
Consequently, with this radar and using speed, the discrimination between balloons and warheads thanks to the drag of the atmosphere (which is sometimes called atmospheric filtering or bulk filtering) can result in very compressed engagement timelines if the decoys are a bit heavy.
A radar can also look which objects have started to lag behind the others: since a small difference in speed can lead to a large difference in position over the hundreds of seconds of the ICBM’s trajectory, looking at position changes can be more sensitive than looking at speed differences:
Using the 2m absolute position accuracy from the Raytheon paper gives a 400km discrimination altitude for the 0.5kg decoy, a 230km altitude for the 5kg one and a 160km altitude for the 20kg one:
In that case, the discrimination ranges are shorter than using speed, because the absolute position accuracy is limited by the delays the atmosphere creates on the propagation of the radio waves, which creates a biais. However, in an ABM scenario, all the objects in the threat cloud should be affected by the same biais, so it can be ignored, and what matters is the relative position of objects in the cloud and how it evolves over time. That should enable longer discrimination ranges but research articles on the topic are understandably hard to find.
Besides, the speed and position precision should be better for an object coming right at the radar, because then the cross-range errors do not impact the tracking. However, there is a way to defeat a radar which can measure the speed and position with absolute accuracy: if the warheads are not rigidly attached to their own balloons, but instead are floating freely inside them without touching them, then these balloons behave exactly as the empty balloons. It’s only when drag has pushed the balloon enough that it collides with the warhead inside that the radar can know there is something inside. For the 3m balloons above, since the warheads are typically shorter than 2m in length, it means that there is 1m of free space between the warhead and the balloon, and consequently the radar needs to wait for a position change of 1m to tell apart the decoys, even if it can measure position down to a millimeter. The same effect applies for speed: as long as the balloon is not touching the warhead, it behaves exactly as if it were empty.
Anyway, the result from these analysis is that with an advanced radar network faced with a threat cloud of 20kg antisimulation balloons rigidly attached to the warheads can expect to discriminate when they reach 300km altitude, at a distance of 700km from the point of impact, and with only 90s remaining before the detonation. If the warheads are free-floating within the balloons, the threshold altitude changes to 200km, ie 480km of distance or 60s before detonation.
Implications in ABM design
Radars
Without any surprise, the better the radars, the more effective the ABM system will be. Ideally, they should be able to discriminate any decoys except the antisimulation ones at long range thanks to range-Doppler imaging, and compute the points of impact to prioritize the responses. For long ranges, large antennas are needed, preferably with high frequencies, although the future US Long-Range Discrimination Radar will operate only in the S band. Radars designed for early detection and not discrimination also operate at low frequencies, such as the UHF band, where the radar return of warheads is strongest and the atmospheric attenuation is minimal, giving them very long ranges.
The reasoning above about warheads floating freely inside balloons means it is probably not useful to try to have an accuracy under 1 meter after extended tracking for the radars, although this could be useful to discriminate simpler decoys.
Location, location, location
For better accuracy in determining the trajectory of the threats and thus their ballistic coefficients, measurements in the cross-range direction should not influence the computation. This is the case when the warheads are aimed at the radars. Consequently the radars should be positioned close to the locations to be defended, which is made easier with the small relocatable X-band radars used by the US THAAD system for instance. This is also the strategy chosen for the Moscow ABM system, which has a very large ABM radar. These system use phased arrays to be able to switch rapidly between many objects, something which cannot be done with a large dish antenna.
However, for ISAR imaging, it is better to view the threats 90° from their trajectories, as they appear to rotate faster, giving a better resolution. That may explain why the US built a large X-band radar on a floating oil platform and put it somewhere in the pacific.
Interceptors
Midcourse
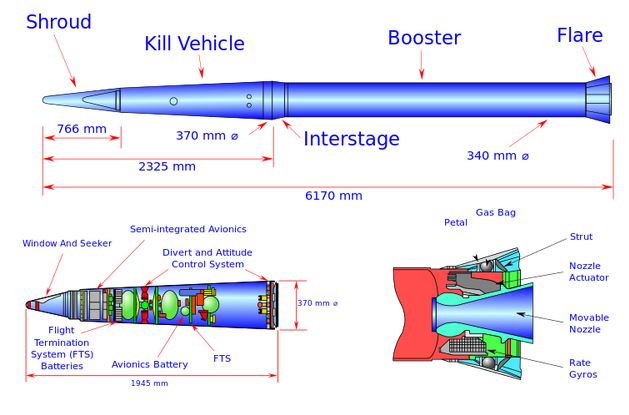
The design of the interceptor depends if the defender thinks antisimulation decoys will be used against them and that they will work. The USA have chosen to mostly ignore this problem, and have deployed long-range interceptors with kinetic kill vehicles, the GBI and the smaller, shipborne SM-3.

Those have never been tested against antisimulation decoys but have been against simpler decoys, and their long range allows them to defend a very large area: they can be launched early, once the radars have solid track of the incoming threat clouds and have weeded out the decoys. The missiles then fly their own ballistic trajectory, mostly out of the atmosphere:

This is called midcourse interception, because it occurs outside of the atmosphere, almost halfway through the flight of the warheads. Large missiles like the GBI can achieve interception very far out but for that they need to gain almost the same speed as an ICBM (around 7km/s):
Interestingly, the US considered nuclear-tipped midcourse interceptor in Zeus and Spartan programs, but eventually gave up on them as they could not solve the midcourse discrimination issue. The miniaturization of warheads and the invention of MIRV also meant that the ICBM cost per warhead fell, whereas there were not such gains on the interceptors, making them economically non workable. These efforts are well documented in Bell labs’ ABM project history:
![2018-10-30 21_11_44-ABM Research & Development at Bell Laboratories - Project History [1975-10].pdf](https://therestlesstechnophile.com/wp-content/uploads/2018/11/2018-10-30-21_11_44-abm-research-development-at-bell-laboratories-project-history-1975-10-pdf.png?w=768)
Terminal Defense
The other option, if decoys are assumed to work, it to rely on the atmosphere to separate the decoys from the warheads, and then launch the interceptor. As seen above, this means launching when the warhead is very close, for instance with 700km/90s to go before detonation. As a result the interceptor better get to its interception point fast, so it needs to punch through the atmosphere at high speed. This is the design historically chosen by the US Sprint ABM, and the Russian for the Moscow ABM Gazelle interceptor. Both were arrow-shaped, for more stability going through the atmosphere, and nuclear-tipped. More recently the USA built the THAAD (Terminal High Altitude Area Defense), with a similar high-speed launch profile but a hit-to-kill warhead, and an even sleeker shape. It is marketed as be able to intercept only short and intermediate-range ballistic missiles, but detailed modelling shows it should perform just as well against ICBMs.


The USA has published quite a lot of information about the Sprint interception profile:
![2018-10-30 21_26_52-ABM Research & Development at Bell Laboratories - Project History [1975-10].pdf](https://therestlesstechnophile.com/wp-content/uploads/2018/11/2018-10-30-21_26_52-abm-research-development-at-bell-laboratories-project-history-1975-10-pdf.png?w=768) The typical intercept path looked like this:
The typical intercept path looked like this:
![2018-10-30 21_01_07-ABM Research & Development at Bell Laboratories - Project History [1975-10].pdf](https://therestlesstechnophile.com/wp-content/uploads/2018/11/2018-10-30-21_01_07-abm-research-development-at-bell-laboratories-project-history-1975-10-pdf.png?w=768)
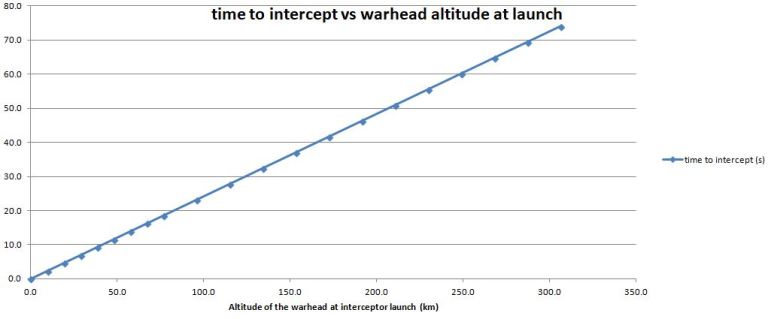
Assuming the Sprint reaches a speed a 3km/s instantaneously, it can then cross 30km in 10s. For a typical intercept against a target with a 22.5° reentry angle, the graph shows the sprint also has a flight path of 22.5°, and thus the intercept occurs 30*sin(22.5°)=11.4km up, and 30*cos(22.5°)=27.7km away. For comparison 40 000 feet is 12.1km high, and 10 nautical miles is 18.5km, so this simple model is not super accurate but gives a ballpark estimate of intercept altitude and distance. It also tells us that the interceptor was launched when the target was about 40km high. This simple model can be used to plot the intercept point depending on the altitude at which the warhead is when the interceptor is launch, for a 3km/s interceptor and a 7.8 km/s warhead:
Note from the depiction of the intercept path that the protected area is fairly small, around 20 nautical miles (37 km) in diameter, even with Sprint’s extraordinary 100g acceleration. To achieve it, the missile had very powerful solid rocket engines, and also a strong heatshield.
![2019-11-07 17_55_05-ABM Research & Development at Bell Laboratories - Project History [1975-10].pdf](https://therestlesstechnophile.com/wp-content/uploads/2019/11/2019-11-07-17_55_05-abm-research-development-at-bell-laboratories-project-history-1975-10.pdf-.jpg?w=768)
Earlier launch thanks to earlier discrimination relaxes the constraints on the interceptor: for instance, the THAAD is designed to intercept targets at higher altitudes, where it can use an infrared sensor for final guidance. During ascent, the sensor is protected so that the heat caused by air friction does not degrade its performance. At high altitude, the sensor is activated, the kill vehicle is separated, and it can position itself with its thrusters in the airless environment in order to collide with the warhead.
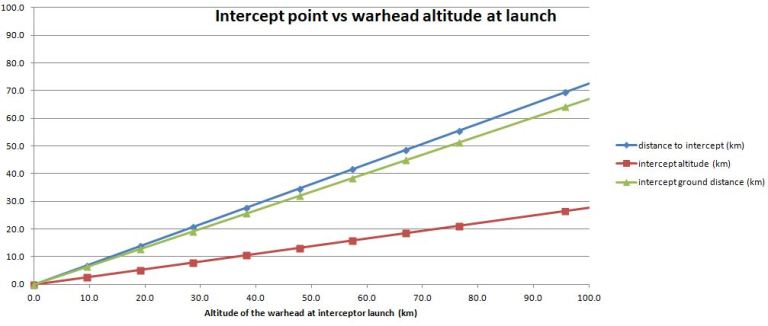
Launching earlier also means the acceleration of the booster is less critical. Here is an example trajectory for a 3km/s interceptor that is launched when discrimination is performed, as the ICBM threat cloud reaches 300km altitude at 7.8km/s:

The interception occurs 71s after launch, at around 80km. This fits well with the simple intercept model, as the warhead trajectory is almost a line:
Hit-to-kill interceptors like THAAD work in quasi-vacuum, where they can maneuver and the warheads cannot. Using a 50km limit for quasi-vacuum, this means they need to be launched before the warhead reaches 180km altitude. After that, the interception will occur in a relatively dense region, where aerodynamic control surfaces can give the warhead a lot of maneuvrability and degrade the interceptor’s infrared sensor, so hit-to-kill becomes much harder and nuclear-tipped interceptors are probably the better solution.
Interestingly, this ~180km discrimination altitude required for using hit-to-kill exoatmospheric interceptors is close to the 200km discrimination altitude against free-floating antisimulation balloons, so the window for using these interceptors against this kind of decoy must be very tight. By optimizing the decoys to minimize frontal area (and thus the position and speed changes induced by drag) while maximizing its length in the direction of the airflow (thus preventing the warhead from bumping into the decoy and revealing itself), this window can probably made to close, making endoatmospheric nuclear interceptors the only workable proposition against non-maneuvrable warheads.
Conclusion
Ballistic missile defense is full of strategic and technical issues, and discrimination between warheads and decoys is probably one of the toughest. Simple decoys can be identified by measuring the strength of their radar signature and its evolution over time, and range-Doppler imaging will reveal all but the most shape and material-accurate replica decoys. However, radio-opaque antisimulation decoys will defeat both these techniques and the likely also measurement of the ballistic coefficient in the midcourse phase, especially if the warheads are floating freely inside them, forcing the defender to wait for the terminal phase before launching interceptors. There, the increased atmospheric drag is both a blessing and a curse for both sides: it will help filter out the decoys, but it will degrade the interceptor’s sensors and make the warheads maneuvrable at low altitudes. Interceptions just outside the atmosphere are probably optimal for the defender, as they can maximize atmospheric filtering while still using infrared-guided kinetic kill vehicles. However, optimized antisimulation decoys might make even this impossible, forcing the defender to rely on short-range intercepts within the atmosphere, and hoping the kill radius of the nuclear payload of their interceptors is greater than the maneuver capability of the attacker’s reentry vehicles.

Interesting post – sorry for commenting on such a dead post. You cover many valid aspects, but you miss one critical one – virtual attrition, or the cost to the offense of defeating the defense.
The classic example is the British nuclear deterrent force and the Soviet ABM defense of the city of Moscow. In the late 1950s, the British deterrent force was based on bombers and arrayed against 1-200 targets throughout European Russia, especially radars and other air defense sites. For a variety of reasons, primarily poor political decisions, the British moved their strategic deterrent forces from bomber-based to submarine-launched ballistic missiles of the Polaris A-3 type.
Since the British only had 1 or 2 subs on deterrent patrol at any one time, the number of targets “threatened” by the switch from bombers to subs dropped from hundreds to a few dozen (16 missiles/sub, 1 target per missile). However, by the early 70s, with the development of the Galosh system around Moscow, the British increasingly focused all their warheads on Moscow, which they regarded as the absolutely vital target that must be hit at all costs (this was at the policy level – at the tactical/targeting level, the US and British strategic forces closely coordinated on their targeting lists and assigned targets appropriately. More on this later). Thus, the number of threatened targets crept steadily downward.
As the 70s went on, the British became increasingly concerned that without advanced PENAIDS which A-3 lacked, even with total focus there was increasing likelihood that Moscow would not be destroyed. Thus by 1973 the entire British deterrent force was concentrated on destroying Moscow and Moscow alone. This is “virtual attrition” – the defense took a force that previously was targeted against 20-30 targets, and reduced it to targeting only one. Thus, without firing a shot or having to be effective in any actual sense, the defense imposed a 90+% attrition on the offense. But by 1973 or so, the British were seriously concerned even this focus could not assure Moscow’s destruction. Apparently they were not convinced of strategic missile defense’s ineffectiveness, nor was the US (more later).
The British looked at various options – the RN strongly preferred switching to the Poseidon C-3 missile which was compatible with their Resolution-class boats, while Polaris was slated to leave service in the USN by the end of the 70s, leaving the British the only users of the Polaris.
However, the British government of the time made the decision to instead upgrade Polaris with a totally new warhead bus and an elaborate system of PENAIDS called CHEVALINE. This became an enormously expensive program that didn’t enter service until well into the 80s and reduced the number of warheads from 3 to 2 on each missile, the rest of the volume/weight taken up by the PENAIDS – jammers, chaff clouds, balloon dispensers, etc. These things do not take up zero weight/space and can reduce offensive payload substantially. So now, even if the British chose to forget about Moscow as a target, they had voluntarily reduced their offensive payload by 1/3 due to the threat posed by a highly limited and focused defense.
The US response? Recently declassified SIOP targeting plans indicated that in many scenarios, the US planned to use up to 400 strategic nuclear warheads, mostly W62s from Minuteman IIIs, to assure Moscow’s thorough destruction. Why such overkill? Well, each warhead has a specific mission against a specific target. Some targets are regarded as absolutely vital to destroy, while others are more marginal. But, when a defensive system is in play, one cannot be sure which warheads the defensive system will get. If there are 20 absolutely “must have” targets in the Moscow area (and a large metropolitan area with numerous high-value targets like Moscow would, at the height of the Cold War, generally have been targeted by several dozen warheads, even in absence of any defense), and there are 100 defensive warheads, high-value targets start getting 5, 6, even 7 or more warheads assigned to assure destruction. Thus, the defense can impose disproportionate losses on the offense, again without firing a shot.
All of this was known back in the 60s. All the dread technical problems you highlight in your piece had known or provably implementable solutions by 1970. The “cost problem” which wound up being the primary weapon against nation-level ABM was undone by virtual attrition – in many cases the defense actually operates on a positive cost ratio due to virtual attrition. Those deep in the defense biz were well aware of this. The key decision-makers were, as well, buuut…..
Virtually all anti-ABM rhetoric even to this day stems from the 1960s and one man – Robert Strange McNamara (and the coterie of “whiz kid” analysts he surrounded himself with, all of which were, very deliberately, of an identical mindset. If they weren’t they didn’t last). McNamara was fundamentally opposed to ABM (or any other name for a thorough strategic defense) because, like virtually all liberals, he started out a hawk and advocating an extremely strong nuclear offense, and ended by being disillusioned and becoming totally dependent on the horrifying logic of MAD to justify his policy choices. The simple fact of the matter is, McNamara staked his entire pre-Vietnam political reputation on the efficacy of ballistic missiles viz a viz the manned bomber, purportedly for their “lower price” (not exactly true) and greater “reliability” (in terms of likelihood to hit the target), but in reality because missiles not only allow but demand totally centralized control concentrated at the highest levels of civilian leadership, which Kennedy/Johnson/McNamara regarded as a totalizing overriding priority regarding nuclear weapons policy. Strategic weapons in particular had to be kept on a very short leash under direct presidential control, which ballistic missiles, due to their total inability to be recalled or aborted in flight, demanded.
So after spending much of 1961/2 arguing passionately in favor of Minuteman and against the B-70, McNamara realized Congress would probably start asking very hard questions about the tens of billions poured into ICBMs if it turned out they were just – perhaps even more – vulnerable to defense than manned bombers. That going with missiles also let McNamara settle some very old scores with a very old nemesis – Curtis LeMay – was all the better. In spite of perfectly workable solutions, McNamara thus deliberately undercut and opposed strategic defenses of every kind (land based air defense, air defense interceptors, AWACs, you name it, he refused to deploy it or even spend the money allocated to it) – not for the ostensible technical reasons, but for perfectly political ones. This was one of McNamara’s favorite tactics – attribute to technical reasons what is actually nothing more than naked politics. See the TFX source selection for another classic example.
Long comment. Maybe someone will even read it, or maybe this blog is as dead as mine……:-(
LikeLiked by 1 person
Very interesting points! Penetrating the Moscow ABM shield and the tradeoff forced on it on the offense was also a big concern for the French deterrence, although we never gave up our air nuclear component like the brits.
With the S-500 the topic is again critical!
What’s your blog?
LikeLike
Given that you believe that the technical problems of ICBM defense are solvable, why hasn’t it been the case that a non-US state (one without the political environment that apparently undermined our BMD programs) has built out its own ICBM defense system?
LikeLike