
Suite au précédent article sur les effecteurs pour la défense anti-drone, celui-ci aborde un autre aspect du problème, celui des capteurs. En effet, il ne sert à rien de pouvoir tirer loin si l’on n’est même pas au courant qu’il y a une cible. Faisons donc un tour d’horizon, forcément partiel, sur les capteurs existants développés par des entreprises françaises pour la détection de mini et micro-drones.
Le capteur idéal devrait avoir tout un tas de qualité, devant:
- fonctionner nuit et jour et par tous temps
- détecter, reconnaitre et identifier les objets
- de le faire à une distance suffisante pour permettre de protéger non seulement le porteur du système antidrone, mais également tout une zone autour de lui. Cette zone est maximisée, une fois pris en compte le temps de réaction nécessaire et le mouvement du drone ennemi pendant ce temps, si la menace est détectée suffisamment tôt pour un engagement à la portée pratique de l’effecteur
- fonctionner en mode automatique sans avoir besoin d’attention humaine, avec un faible taux de fausses alarmes
- être discret pour ne pas révéler la présence et position du système à l’ennemi
- être facile à intégrer, avec un volume, une masse, une puissance requise faibles et sans nécessiter une position particulière sur le véhicule porteur
- fonctionner sur un véhicule en mouvement
- être robuste aux évolutions technologiques de la menace (par exemple l’intelligence accrue des drones et donc la réduction de leurs émissions) et aux contre-mesures (brouillage)
- avoir un coût faible
Cette liste au père Noël étant établie, regardons ce qui est disponible sur étagère. Il y a déjà une large offre, grâce au soutien des armées et du SGDSN à travers les projets MILAD, BOREADES, SPID, BASALT et le plus récent PARADE. Ils peuvent s’aborder selon une typologie capteur actif ou passif déclinée ensuite selon le principe physique.
Capteurs passifs
Les capteurs passifs n’émettant rien, ils remplissent l’exigence de discrétion. Ils ont également tendance à consommer moins pour le capteur en lui-même, en excluant le traitement du signal.
Audio
Deeplomatics est un projet soutenu par la DGA, qui consiste à utiliser un réseau de microphone arrangés sur une sphère pour localiser avec précision les sources de bruit et également les classifier, en étant pour cela couplé avec une caméra. Plutôt dédié à la protection de site fixes, il peut fonctionner avec plusieurs sphères en triangulation pour récupérer une position en 3D. Chaque sphère étant assez compacte, on pourrait imaginer en déployer une sur chaque véhicule d’une section, à la manière du capteur acoustique PILAR-V qui est disposé sur chaque blindé Scorpion, mais qui lui sert à la détection de départ de coup.
Une des limitations pourrait être le bruit de fond créé par du vent ou le mouvement d’un véhicule porteur, bien que cela peut être pris en compte dans le développement matériel et de l’algorithme. Un point plus dur à traiter est probablement la détection de munitions rôdeuses planantes attaquant moteur coupé en phase terminale.
Radiofréquences
La société Cerbair, bien établie dans la lutte antidrone, propose le capteur Hydra, qui détecte la liaison de données entre le drone et son pilote, et est capable par goniométrie de les localiser, et même d’identifier le type de drone. Pour le modèle le plus performant, l’Hydra 300, la portée annoncée est de 2km et la précision de 3° (soit 100m à 2km).

La limitation de ce genre de capteur est la probable généralisation de systèmes d’IA embarquée dans les drones, en particulier les modèles militaires. Ils pourraient alors agir sans aucune émission, ou avec un contact très sporadique avec leur contrôleur, pour uniquement demander l’autorisation d’attaquer une fois une cible identifiée par exemple. A court terme, par contre, très peu de drones ont cette capacité.
De son côté, MC2 technologies, autre entreprise experte du domaine qui fournit entre autres les brouilleurs du système fixe MILAD et les fusils brouilleurs NEROD, propose le MERCAT, avec une portée revendiquée de 5km
Roboost propose une solution similaire appelée Droneblocker, qui a été commandé par la Marine Nationale à trois exemplaires.
Optique
Les capteurs optiques doivent résoudre une contradiction fondamentale: ils doivent détecter de petits objets qui peuvent se trouver n’importe où dans le ciel. Il faut donc une forte résolution, et un grand champ de vue. Cela impose d’avoir un nombre de pixels très important à acquérir et à traiter.
Une première famille de solutions est d’utiliser un seul capteur avec une lentille fisheye, comme les caméras plein ciel d’astronomie. Inpixal a développé un tel système appelé Panodrone:
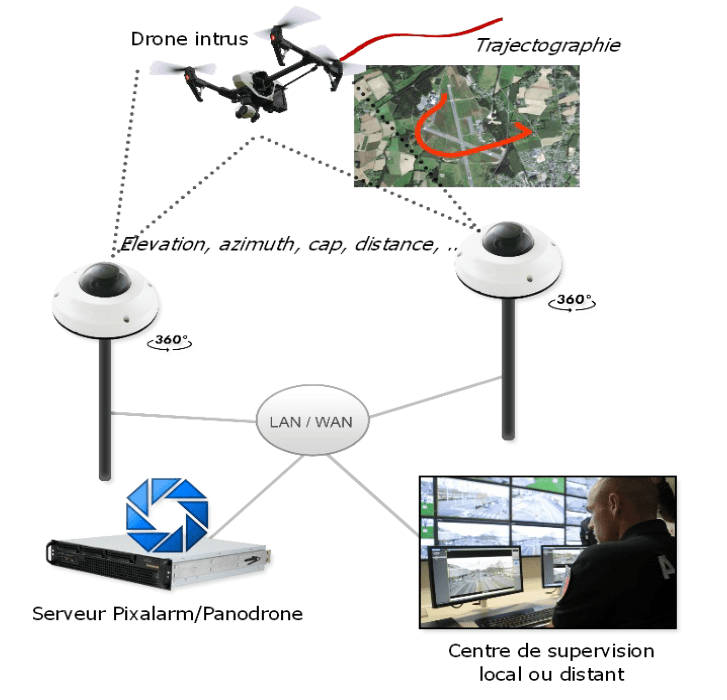
La distance de détection est de 500m maximum, avec probablement une limite due au manque de netteté de la lentille en particulier sur les bords du champ.
Pour dépasser ces contraintes, on peut imaginer un système avec un grand nombre d’optiques. C’est ce qu’à fait Lerity-Alcen avec Hemispace, avec le soutien de la DGA. Ce système a 12 caméras, surveillant chacune un secteur de 50° avec 40 mégapixels, avec une résolution de 20cm à 1km:

Cela simplifie grandement le problème, et la portée atteint 1km. L’intégration est relativement facile avec une taille de 50cm et un poids de 15kg. Comme pour les systèmes avec une lentille fisheye, c’est la triangulation entre les détections de plusieurs systèmes qui donne la position précise de la cible, ce qui nécessite une bonne connaissance de leur position relative et un logiciel dédié de mise en réseau et de fusion des pistes. Bien que ce ne soit pas le cas pour Hemispace, on imaginer un système multi-optiques équivalent mais en séparant les caméras pour les intégrer plus facilement dans un véhicule dont les points hauts sont déjà occupés, avec néanmoins une calibration un peu plus compliquée pour garder la même précision. Le capteur pourrait faire double-emploi pour la vision panoramique du véhicule, à la manière d’une optique périphérique comme l’Antares de Thales présent sur les véhicules Scorpion, qui a cependant pour lui la détection d’illumination laser et la couleur (qui est en phase de test pour Hemispace).
Les capteurs de l’Hemispace sont des caméras CMOS à bas bruit, ce qui permet au système de fonctionner (avec des performances probablement dégradées) le soir et les nuits de pleine lune. Néanmoins, elles sont aveugles dans le noir total. Pour cela, une version avec des illuminateurs proche infrarouges en plus des caméras est en développement. Néanmoins, le système n’est alors plus totalement passif.
Pour avoir un système optique purement passif de nuit, il faut se tourner vers l’infrarouge thermique. Il y a alors un soucis, qui est que le coût par pixel d’un tel capteur est bien plus élevé, et que pour garder une résolution similaire la taille des lentilles doit être cinq à dix fois supérieure. Un système comme Hemispace en infrarouge thermique serait inabordable.
HGH infrared systems a néanmoins trouvé à la parade avec ses systèmes infrarouge rotatifs Spynel. A partir d’un unique capteur infrarouge refroidi d’une taille d’un megapixel, un Spynel-X offre une image panoramique avec jusqu’à 120 mégapixels. Le champ de vue vertical est cependant limité entre 5° et 20°, une vue hémisphérique complète demandant un scan de la tête optique dans le plan vertical également.

HGH décrit ce système comme un “radar infrarouge”, capable de détecter un humain à 9km même la nuit, et d’en extraire une piste à partir d’un logiciel de suivi, et même d’en mesurer la distance avec un télémètre laser intégré. L’entreprise en fait également la promotion pour la détection de petits drones, sans toutefois en révéler la portée, même si elle semble dépasser le kilomètre sur un ciel clair:
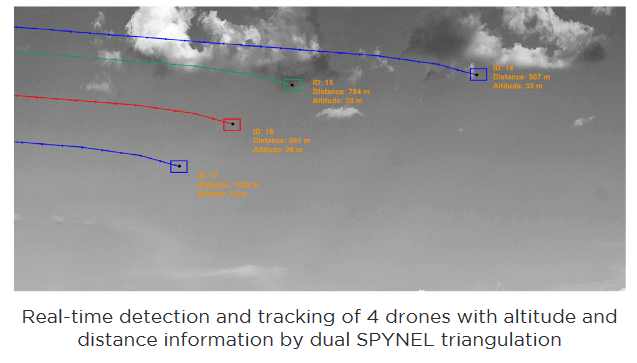
La portée est limitée par le contraste thermique du drone par rapport au fond de ciel. Même si un drone à moteurs électriques dégage peu de chaleur, il est quand même au moins à la température de l’air ambiant, et peut présenter un contraste plus ou moins important avec le fond du ciel selon la présence de nuages ou pas par exemple.
Comme les capteurs hémisphériques à caméras classiques, la quantité de données produites est importante. Les transférer à travers un connecteur rotatif haut débit est une difficulté supplémentaire, sauf si la détection des objets est faite dans la tête elle-même.
Capteurs actifs
Radar
Les radars traditionnels dédiés à l’aviation ne sont pas optimisés pour suivre des objets d’une dizaine de centimètres évoluant lentement près du sol, et avec une bonne part de composants en plastique. La signature radar des petits hélidrones est faible, et leur vitesse également. Cela pose deux problèmes:
- D’abord la détection. Si le drone est suffisamment haut sur l’horizon, le faisceau du radar ne voit que lui, ce qui facilite la détection. Par contre, si il est proche du sol, le faisceau recevra de nombreux échos supplémentaires, ce qui peut dégrader la performance. Un faisceau fin est donc avantageux et pour ce faire, il faut soit augmenter la taille de l’antenne, soit la fréquence du radar.
- Ensuite la reconnaissance. Il faut pouvoir différencier un petit drone d’un oiseau volant à la même vitesse. De la même façon que la vitesse d’un objet peut être estimée à partir de l’effet Doppler (un objet en rapprochement du radar renvoie des échos de plus haute fréquence, un en éloignement de plus basse fréquence), ce qui sert d’ailleurs dans l’étape détection à filtrer les échos du sol, on peut utiliser le même effet pour détecter la rotation des hélices d’un mini drone. Cet effet micro-doppler est encore plus faible que l’écho du drone, vu qu’il est créé uniquement par les hélices en plastique et le bobinage du moteur, et comme l’effet Doppler est proportionnel à la fréquence, il est d’autant plus facile à séparer de l’écho principal que la fréquence est élevée. Il permet également de détecter les drones en vol stationnaire proche du sol.
- Enfin l’identification. Différents types de drones peuvent avoir différentes signature micro-Doppler, ce qui peut servir à une première forme d’identification.
On retrouve dans cette catégorie MC2 technologies avec le radar MATIA. Ce radar fonctionne dans la bande TeraHertz, soit à une fréquence cent fois plus élevée que celui d’un avion de combat par exemple. La longueur d’onde est de l’ordre du dixième de millimètre. La portée annoncée est de 1km.
A titre de comparaison, le véhicule anti-drone de l’armée de terre, le VAB ARLAD, est équipé d’un radar FLIR Systems monté sur un mat. Il s’agit probablement de ce modèle, capable de détecter un mini-drone à 2500 mètres, et un micro-drone à 1km selon le fabriquant.
Du coté des radaristes plus traditionnels, Thales a révélé au salon du Bourget 2023 une solution appelée le Ground Smarter 20, intégrée à la tourelle Rapidfire:
Le radar sur la maquette était un panneau AirMaster C, il s’agit donc probablement d’un nom pour la version terrestre de ce radar extrêmement compact déjà intégré au programme H160M. L’armée de terre porte un certain intérêt à ce radar, qui pourrait servir à boucher les trous de couverture à basse altitude entre des radars plus gros comme le Ground Master 60.
Il faut noter qu’on trouve dans l’armée de terre le radar Murin, c’est à dire le Ground Observer 12 de Thales, qui est donné pour 4km de portée contre un drone de 0.01m² de surface équivalente radar.
Conclusion
Ce panorama sur les capteurs permet de se rendre compte qu’il est difficile de détecter les petits drones à une distance de plusieurs kilomètres. Les systèmes radiofréquence passifs promettent des portées jusqu’à 5km, tout en étant passifs et capables de fonctionner la nuit, pour un coût de production probablement assez contenu, et sont donc une solution intéressante dans un premier temps. A moyen terme, les performances accrues en terme d’IA embarquée sur les drone pourraient leur permettre de se passer de liaison de donnée, ce qui contraindrait à passer à des capteurs optiques ou alors à de petits radars, dont la portée utile semble être autour du kilomètre sur micro-drone. Pour des raisons de discrétion opérationnelle, l’optique sera probablement privilégiée, et on pourrait alors assister à un déploiement massif de capteurs sur le véhicules Scorpion, en se reposant sur la mise réseau pour assurer la triangulation des pistes. Les radars gardent cependant tout leur intérêt pour les drones volant plus haut, et les situations de brouillard, de plafond nuageux très bas, ainsi que la nuit.
