
L’utilisation de robots de combat terrestre capables d’ouvrir le feu ne relève plus de la science-fiction, mais bien de la réalité des conflits d’aujourd’hui: en complément des petits drones aériens type FPV et de leur drone navals, les ukrainiens utilisent contre les forces russes des petits robots à roue portant une mitrailleuse. Les russes ont d’ailleurs été précurseurs dans le domaine avec l’emploi de robots lourds Uran-9 en Syrie, avec semble-t-il un résultat mitigé.
La France n’entend pas passer à côté de cette technologie. Les industriels proposent depuis une petite dizaine d’années des robots armés. Si l’Armée de Terre ne s’en est pas dotée en quantité, elle a commencé une démarche d’expérimentation, avec l’envoi au Mali de drones “mules” destinés à porter du matériel pour décharger le combattant. Pour piloter la démarche et passer de l’expérimentation à un vrai déploiement dans les forces, l’Etat-Major de l’Armée de Terre a établi en 2021 le projet Vulcain. Un premier état des lieux avait été donné par le bureau Plans à Eurosatory 2022, et soulignait les enjeux éthiques de la question, ainsi que les opportunités offertes par la technologie en terme de regain de masse de manœuvre.
Le projet Vulcain
Une mise à jour sur le sujet a eu lieu pendant l’édition 2024. Le Colonel Pierre CASANOVA a présenté les enjeux de la robotique terrestre:
- avoir une forme éthique d’autonomie
- garder une supervision par l’homme
- être faisable techniquement et financièrement
- être cohérent avec le reste du système de forces SCORPION puis TITAN, en particulier les drones aériens

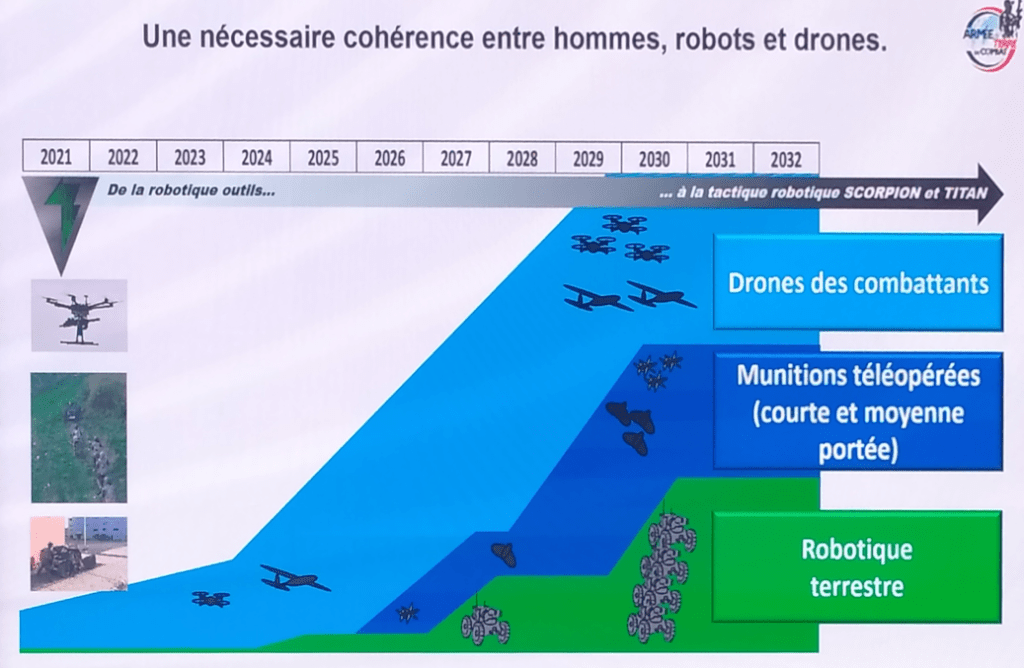
Le plan prévoit une montée en puissance progressive, avec un défrichement de l’état de l’art et des besoins qui est en cours, et l’introduction de prototypes dans des unités pilotes en 2025, suivi d’un déploiement de masse dans les unités opérationnelles en 2 vagues, en 2027 et en 2030. En parallèle, coexistent des programmes de robotique spécialisée (par exemple de déminage) et se développent les trames drones et munitions téléopérées. L’intégration de plus en plus d’autonomie est un aspect commun pour tous ces systèmes, avec en plus pour les MTO une question similaire de définition du besoin (en terme de charge militaire par exemple) et également d’intégration au côté des appuis déjà existants. De même, la question du fonctionnement en essaim se pose pour les 3 systèmes. A l’horizon 2040, une convergence est attendue entre les robots terrestres et les drones aériens (probablement sur des briques comme l’IA, même si ça devrait arriver avant).
Les menaces en 2030 seront multiples, des traditionnels fantassins et blindés, à d’autres robots de combat, en passant par les drones et munitions rôdeuses ennemies, sans oublier les attaques dans les champs immatériels comme le cyber ou le brouillage. Pour y répondre, le premier incrément de la robotisation apportera un engin qui augmentera les capacités de détection et d’agression de l’infanterie avec une arme de calibre strictement supérieur au 7.62, et qui sera contrôlé à vue par un seul opérateur d’une groupe ou d’une section d’appui.
Le calibre n’est pas arrêté, la 12.7 comme le canon de 20mm sont envisagés, le maximum étant probablement le canon de 30mm court (30×113) afin de limiter l’encombrement et de pouvoir correctement suivre l’infanterie. La mitrailleuse de 12.7 est déjà présente dans les régiments d’infanterie, néanmoins elle est extrêmement lourde, pesant 60kg avec son affut, auxquels il faut rajouter les poids des munitions. Elle est donc emportée soit sur véhicules, soit nécessite d’être portée démontée à dos d’hommes, puis remise en batterie. Disposer d’une puissance de feu comparable, sur un porteur beaucoup plus discret qu’un blindé Griffon ou Serval, et pouvant suivre les fantassins dans leur progression à pied serait très intéressant.


Les missions envisagées relèvent du combat débarqué de l’infanterie médiane, avec la reconnaissance, la défense et le freinage par exemple. La priorité donnée au segment médian peut s’expliquer par le fait que les brigades lourdes disposent du VBCI, un véhicule de transport de troupes qui appuie déjà l’infanterie avec son propre canon de 25mm. Les brigades légères quand à elles opèrent soit dans un milieu plus difficile, la montagne, pour la brigade alpine, où la neige et la raideur des pentes vont limiter les possibilités d’emploi d’un robot, ou alors pour la brigade parachutiste disposent déjà de petits véhicules maniables servant à décharger le fantassin ainsi que de remorques de randonnée. L’intégration de robots au combat embarqué, avec par exemple des blindés “loyal wingman” robotiques opérant hors de la vue, viendra dans un incrément ultérieur.
Le robot devra s’intégrer facilement à l’existant, en terme de maintenance et d’empreinte logistique par exemple, mais surtout en terme d’acceptation et d’adoption par les soldats: les mules robotiques déployées au Mali sont restées à la base faute d’une bonne prise en main par les troupes. De plus, il est primordial ne pas impose au soldat opérant le robot une charge cognitive excessive, rendant nécessaires une interface homme-machine performante et la reprise de certaines fonction (navigation, détection, etc…) par des briques d’autonomie de plus en plus poussées. Pour obtenir une masse d’engins suffisante, le coût devra être maitrisé, et les systèmes devront pouvoir évoluer facilement y compris avec des standards ouverts pour éviter de se retrouver captif d’un industriel.
Des questions de droit se posent encore. Par exemple il n’existe pas de notion de légitime défense d’un robot. Sur le droit de l’autonomie, on peut constater que des systèmes autonomes, auxquels un humain fixe un cadre temporel et spatial de fonctionnement existent déjà: ce sont les mines. Néanmoins la France a choisi de ne pas développer de systèmes létaux complètement autonomes.
L’offre industrielle
On retrouvait sur le salon un certain nombre d’offres existantes, par exemple le robot chenillé Themis de l’Estonien Milrem Robotics, avec différentes armes, sur les stand Thales et KNDS. Sur ces mêmes stands, on voyait aussi le robot à roue Phobos du français Sera Ingénierie/Sogéclair, sous la forme d’un robot de génie avec un bras et d’un robot armé portant un canon de 20 appelés Centurio chez Nexter, et portant une suite d’analyse bactériologique/radiologique/chimique chez Thales.



Les industriels français ont également dévoilé des nouveautés. Thales exposait le VARAN (Véhicule Autonome de Reconnaissance, d’Action et de Neutralisation), de petite taille et sur lequel il est difficile de trouver des détails:

Arquus mettait en avant le Drailer, un 4×4 de taille intermédiaire. UNAC a également annoncé une version robotisée du Rider, son petit véhicule qui équipe déjà les parachutistes. La partie autonomie étant réalisée par Safran. Enfin, Soframe, en collaboration avec Exail, avait à son stand son fardier MkII en version génie, d’une taille comparable au Phobos




On observe des points de convergence dans les solutions: ce sont tous engins à 4 roues motrices qui peuvent être tractés à haute vitesse derrière un véhicule de transport de troupes pour ne pas dégrader la mobilité opérative de la force. Le Phobos et le Fardier MkII, d’une taille plus conséquente, ne sont peut-être pas principalement destinés au programme de drones armés de l’infanterie mais surtout au programme ROBIN de drone du génie. Par contre, le Drailer et le rider robotisé, ainsi que le Ultro de KNDS et potentiellement le Barakuda de Shark robotics qui ont été dévoilé il y a quelques années, ont un format plus limité mais peuvent quand même emporter une arme de 12.7 au moins, et disposent d’un plateau pour emporter du matériel supplémentaire.
Plutôt qu’un long discours, voici un tableau comparatif des différentes propositions, avec en regard l’omniprésent Themis, le Probot également testé au Mali et le quad de renseignement furtif, un autre engin amené à porter des charges à travers des environnements déstructurés:
| Nom | Phobos | Ultro | Drailer | RIDER robotisé | Fardier MkII |
| Fabricant | Sogeclair | KNDS France | Arquus | UNAC & Safran | Soframe & Exail |
| Largeur x longueur | 1.9 x 3.5m | 1.3 x 2.0m | 1.6 x 2.45m | 1.55 x 2.6m | 1.8 x 4.3m |
| Poids maximal | 2.8t | 1.4t | 1.6t | 2.6t | 3.5t |
| Charge utile | 1t | 0.6t | 0.7t | 0.9t | 1t |
| Moteur | Thermique | Batteries | Batteries (Hybride en option) | Thermique | Thermique |
| Nom | Themis | Barakuda | Probot | Quad de Renseignement Furtif | |
| Fabricant | Milrem | Shark robotics | Roboteam | Polaris & Furion | |
| Largeur x longueur | 2.0 x 2.5m | 1.2 x 1.6m | 1.3 x 2.0m | 1.26 x 2.5m | |
| Poids maximal | 2.3t | 1.2t | 1.2t | 0.9t | |
| Charge utile | 0.7t | 0.5t | 0.7t | 0.4t | |
| Moteur | Hybride | Batteries | Batteries | Hybride |
Pour comparaison le blindé Griffon qui est le transport de troupes des brigades médianes fait 2.54m de large, 3.5m de haut et 7.6m de long, et emporte un tourelleau avec une mitrailleuse 12.7. On voit tout de suite la réduction de silhouette offerte par la robotisation, sachant que la réduction de signature infrarouge est également significative, le Griffon emportant un moteur thermique de 400 chevaux alors que le moteur thermique du Rider n’en fait que 60 par exemple. Les solutions à base de batterie sont encore plus discrètes puisqu’elles dégagent peu de chaleur même en mouvement, mais posent la question de l’autonomie au combat. Les solutions hybrides sont probablement un bon compromis pour allier d’une part discrétion en phase d’approche et de veille et d’autre part endurance.


Un autre point de comparaison intéressant, vu qu’il correspond au même concept de petit véhicule porteur d’arme que l’incrément 1 de Vulcain mais en version habitée, est le Wiesel des parachutistes allemands. C’est une chenillette compacte, de 1.8m de large et 3.5m de long, d’un peu moins de 3 tonnes et emportant un canon de 20mm. Il sera remplacé par le LuWa, de 4.5t et emportant un canon de 25mm. Le Wiesel est proche des dimensions du Phobos ou du Fardier MkII et donc présente une bonne base de référence montrant qu’il est possible d’avoir une puissance de feu conséquente dans une petite empreinte au sol.


Cependant, la largeur de 1.8-1.9m risque d’être un problème pour suivre l’infanterie dans les terrains complexes qui sont son milieu de prédilection, par exemple en forêt hors des routes. Même pour les engins de largeur inférieure dans la gamme 1.2-1.6m, la tache risque d’être ardue: ils passeront dans des chemins plus étroits, mais réduire la largeur en gardant une garde au sol raisonnable et une charge utile suffisante pose des problèmes de stabilité, en particulier dans les dévers: par exemple le Drailer est donné dans sa fiche technique comme capable de franchir des dévers de 30% seulement (probablement chargé), c’est à dire 17° de pente en travers de la trajectoire, ce qui est très loin d’être limitant pour un fantassin. Quand on ajoute en plus la contrainte de devoir supporter le recul de l’arme quand elle tire vers le côté, les solutions de mobilité conventionnelles à base de 4×4 risque de ne pas suffire. La question se pose donc des limitations qu’impose le robot à la mobilité de l’infanterie, et de quelles modifications de doctrine elles peuvent nécessiter.
Une autre question liée aux dimensions est le transport par avion et hélicoptère. Une soute d’avion de transport A400M fait 4m de large, donc garder la largeur du robot sous 2m permettrait d’en mettre deux en parallèle. Pour l’hélicoptère NH90 les choses se corsent, l’ouverture faisant seulement 1.78m de large et 1.58m de haut, trop peu pour le Phobos et le Fardier MkII. Il y a également une limite de masse autour de 3t pour conserver un rayon d’action intéressant et une limite en longueur de 4.8m.
Bien que dans la plupart des cas un plateformier comme UNAC s’associe avec un électronicien comme Safran pour développer une offre, les annonces récentes ont été très peu disertes sur la partie électronique et logiciel. On en sait donc peu sur le degré d’autonomie actuellement atteint par les robots.
Options d’armement
Pour revenir à la question de l’armement pour l’incrément 1 de Vulcain, qui doit donc être strictement supérieur au 7.62 comme exigé par l’Armée de Terre, de nombreuse options sont disponibles. La première est d’utiliser les mêmes tourelleaux que sur les blindés du programme Scorpion, à savoir le tourelleau T1 Hornet d’Arquus, que l’industriel a d’ailleurs exhibé sur son Drailer. Le T1 porte une 12.7 au maximum, donc une capacité intéressante. Il faut toutefois noter que bien que la 12.7 ne puisse pas être portée par un seul homme, les américains comptent la remplacer dans certains usages par des mitrailleuses en 8.6NM, avec un poids de 12kg comparable à une mitrailleuse de 7.62 et une portée similaire à la 12.7.
Le T1 peut également emporter un lance-grenade de 40mm. Cette arme a l’avantage de pouvoir emporter des munitions chronométriques (airburst) qui permettent de frapper derrière les couverts et utile jusqu’à 600m pour la lutte anti-drones, et d’avoir un diamètre suffisant pour y loger une charge creuse pour l’anti-véhicules. On trouve d’ailleurs des munitions double-emploi (HEDP) combinant les deux fonctionnalités. Par contre la faible vitesse des projectiles contraint à un tir courbe moins précis et avec moins de portée, quoi que les fabricants donnent une portée pratique de 1500m. La désignation d’objectifs par un drone (idéalement avec un télémètre) pourrait permettre de s’en servir comme une forme d’artillerie en frappant au-delà de la vue directe.

Cependant pour exploiter au maximum l’emport offert par un robot il faudra peut-être passer à une gamme supérieure, à commencer par le 20mm qui intéresse fortement les opérationnels, l’incrément 1 ayant été décrit schématiquement comme “un chien avec un canon de 20”. KNDS France propose sur ce créneau l’ARX20 d’une masse comparable au T1 mais avec deux fois plus de recul à cadence maximale. Au-dessus dans la gamme de l’industriel, on trouve l’ARX30, qui est un 30mm court en 30×113 récemment développé. Il a l’avantage de pouvoir tirer des obus chronométriques également. Les performances en terme de pénétration de blindage des obus KNDS sont limitées, mais les fabricants américains proposent des obus HEDP avec des capacités intéressantes.


A l’extrême et bien qu’on en n’ait pas vu de monté sur des robots même de la taille du Phobos se trouvent les tourelles légères de 25mm comme l’ARX25 LP de KNDS ou la CLWS25 de John Cockerill. Leur masse de 600kg environ est à la limite haute de ce qui est accepté pour les robots de gabarit Ultro ou Drailer. Si l’intégration de CLWS 25 ou 30 est possible sur Drailer il est possible qu’on en voie émerger un prototype bientôt, John Cockerill venant de racheter Arquus. Le 25mm a l’avantage que généralement les canons sont capables d’alterner entre des munitions anti blindage et des munitions explosives selon la cible. Les munitions chronométriques ne sont pas encore disponibles par contre.
Ici aussi un tableau comparatif est utile
| Nom | Hornet T1 | ARX20 | ARX30 | ARX25LP |
| Fabriquant | Arquus | KNDS France | KNDS France | KNDS France |
| Masse en ordre de combat | 270kg | 300kg | 350-500kg | 600kg |
| Armement | 12.7, 7.62 ou lance grenade 40×53 | 20×102 ou 20×139 + armement secondaire | 30×113 | 25mm double alimentation + armement secondaire (7.62, roquettes,…) |
| recul moyen sur une rafale | 12.7: 75-125kg | ~200kg | ~110 kg | ~70-200 kg |
| pic de recul | ? | 250kg | 650kg | 1750kg |
| cadence de tir (coups/min) | 12.7: 450-650 | 750 | 225 | 125-400 |
| pénétration blindage (munition dédiée) | 12.7: 8mm à 1200m (M8) 23mm à 0° 1200m (M903 SLAP) 40×53: >65mm indépendant distance à 0° (HEDP) | 26mm à 800m 30° (KNDS 20×139 AP) 20mm à 800m 30° (KNDS 20×102 AP) | 26mm indépendant distance à 50° (HEDP) 15mm à 45° 200m (KNDS SAPHEI) | >30mm à 2000m 60° (KNDS APFSDS) |
Le coût de l’armement est aussi un critère important, surtout si la robotisation doit au final apporter de la masse à l’Armée de Terre. Mais même le tourelleau T1, produit en grande série pour Scorpion, n’équipera pas tous les véhicules du programme pour faire des économies. Donc même si la plateforme est peu chère, équiper tous les groupes d’appui d’un robot représentera un investissement conséquent.
Le tourelleau capable de pivoter et faire feu à 360° n’est pas la seule option cela dit. Faire feu de côté depuis un engin de faible largeur pose des problèmes de stabilité à cause du recul. Restreindre l’arc de tir au secteur frontal permet de mettre en ouvre une arme plus puissante, et de réduire les contraintes sur le tourelleau, par exemple cela permet de débarques les munitions du tourelleau et de les mettre sur la caisse du véhicule à la place. Pour peu que l’engin soit capable de tourner sur place par ripage pour positionner correctement son secteur de tir, et que le secteur d’observation soit suffisamment large avec une optique indépendante de l’arme par exemple, on ouvre alors des possibilités intéressantes. Il semblerait que ce soit l’option choisie par les Russes pour leur robot Courier, qui fait seulement 60cm de large mais emporte une 12.7, bien que la très faible hauteur du robot aide aussi à limiter l’impact du recul.
Enfin, bien que ça ne soit apparemment pas envisagé par l’Armée de Terre, l’utilisation de robots pour aider au tir indirect en portant les mortiers de l’infanterie serait une autre piste intéressante. Les sections d’appui disposent de mortiers de 81mm, qui pèsent quand même 45kg une fois assemblés plus 4kg par obus et nécessitent une équipe de 5 hommes. Les forces spéciales se sont dotées de systèmes de déploiement et pointage automatique de mortier de 81mm pour leurs buggys légers MRZR, avec seulement 1 à 2 opérateurs. Leur intégration sur robot est une possibilité, qu’Arquus revendique explicitement pour son Drailer.
Conclusion
Suite à une première phase d’expérimentation, l’armée de Terre a choisi pour un premier incrément de se doter de robots armés pour appuyer l’infanterie médiane. Cela donnera à cette dernière l’option d’augmenter sa puissance de feu au détriment de sa mobilité tactique dans les terrains les plus difficiles. Les choix définitifs en terme d’arme et de plateforme ne sont pas encore faits, mais l’industrie française a développé une offre large d’engins autour de 2-3 tonnes de charge maximale et de tourelleaux pouvant être montés dessus.
